1. 简介和功能概述
本文描述了AUTOSAR基础软件模块CAN接口(CAN Interface)的功能、API和配置。
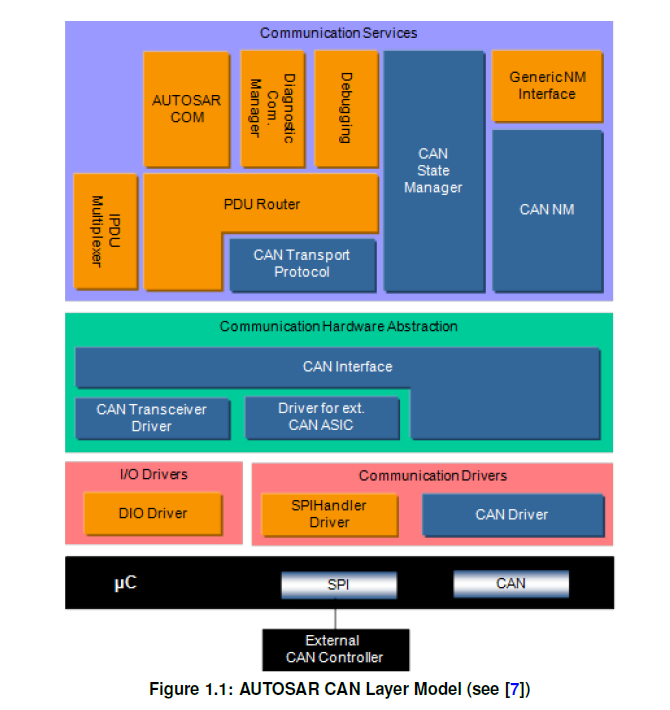
如图1.1所示,CAN接口模块位于下层CAN设备驱动程序(CAN驱动程序[1]和收发器驱动程序 [2])和上层通信服务层(即CAN状态管理器[3]、CAN网络管理[4]、CAN传输协议[5]、PDU路由器[6])。它提供上层通信层的CAN驱动程序服务的接口。
CAN接口模块通过提供了唯一的接口,来管理不同的CAN硬件设备类型:CAN控制器(CAN Controllers)和CAN收发器(CAN Transceivers)。因此CAN状态管理器模块(CAN State Managers)可以基于物理CAN通道相关视图,来控制底层的多个内部和外部CAN控制器及CAN收发器。
CAN接口模块完成所有与硬件无关的CAN任务,这些任务原属于相应ECU的CAN通讯设备驱动程序。这些功只能在CAN接口模块中实现一次,从而底层CAN设备驱动程序只需关心如何对特定的CAN硬件设备的访问和控制。
CanIf实现了PDU路由器(PDU Router)和AUTOSAR COM堆栈的上层通信模块的所需的控制流和数据流要求,包括:
- 发送请求处理(transmit request processing)
- 发送确认/接收指示/错误通知(transmit confirmation / receive indication / error notification)
- CAN控制器的启动/停止(start / stop of a CAN Controller)
- 唤醒/参与网络(waking up / participating on a network)
它的数据处理和通知API是基于CAN的L-SDU,然而对于用于控制和模式处理相关的API提供了与CAN控制器相关的接口。
在传输请求的情况下,CanIf使用相应的参数完成L-PDU传输,并通过适当的 Can驱动程序将CAN的L-PDU转发到CAN控制器。 在接收时,CanIf将接收到的 L-PDU作为L-SDU分发给上层。具体接收到的L-SDU分发到哪个上层模块是静态配置的。在传输确认时,CanIf负责通知上层模块传输成功。
CAN接口模块为CAN通信提供了对CAN驱动程序和CAN收发器驱动程序服务的抽象访问。CAN接口模块实现了控制和监督CAN网络。CAN接口模块将来自CAN状态管理器的状态更改请求,向下转发到下层CAN设备驱动程序。同时向上将CAN驱动程序或者CAN收发器驱动程序的事件转发到上层模块(例如:对应的NM模块)。
2. 缩略语
CAN L-PDU
CAN协议数据单元(CAN Protocol Data Unit)。由CAN驱动程序可见的标识符(identifier)、数据长度和数据(SDU)组成。
CAN L-SDU
CAN服务数据单元(Service Data Unit)。CAN的L-PDU内的传输数据。对CAN接口的上层可见(例如:PDU路由器)。
CanDrv
3. 相关文档
4. 约束和假设
4.1. 限制
CAN接口只能用于CAN通信,并且专门设计用于与一个或多个底层CAN驱动程序(CAN Drivers)和CAN收发器驱动程序(CAN Transceiver Drivers)一起运行。不同CAN硬件单元的多个CAN驱动模块仅通过通用的CAN驱动规范[1]定义。 同样,不同CAN收发器设备的多个CAN收发器驱动模块也仅通过通用的CAN收发器驱动规范[2]定义。
不支持CAN以外的其他协议(如:LIN或FlexRay)。
请注意,被激活的PnTxFilter确保了总线上的第一条消息是CanIfTxPduPnFilterPdu。如果CanIfTxPduPnFilterPdu是NM-PDU,COM堆栈启动会注意禁用PduGroup,直到成功传输该PDU。但是在发送配置的PDU之前,其他PDU的传输请求将被拒绝。如最初启动的PDU(Initially started PDU)、TP-PDU、XCP-PDU等。只有第一个发起网络唤醒的PDU必须是CanIfTxPduPnFilterPdu。 如果通信正在进行并且在启用PnTxFilter的情况下成功接收帧,则应禁用PnTxFilter。在这种情况下不需要PnTxFilter,因为Ack将由已经激活的节点提供。
4.2. 对汽车领域的适用性
CAN接口可用于使用CAN协议的所有应用。
5. 对其他模块的依赖
6. 功能规格
6.1. 概述
CanIf 支持的服务主要分为以下几类:
- 初始化(Initialization)
- 传输请求服务(Transmit request services)
- 传输确认服务(Transmit confirmation services)
- 接收指示服务(Reception indication services)
- 控制器模式控制服务(Controller mode control services)
- PDU模式控制服务(PDU mode control services)
CanIf 可能会采用以下的模式:中断模式、轮询方式和混合模式。
6.1.1. 中断模式(Interrupt Mode)
CanDrv 处理由CAN控制器(CAN Controller)触发的中断。CanIf 是基于事件的,当事件发生时会收到通知。在这种情况下,相关的 CanIf 服务在 CanDrv 中的相应 ISR 中被调用。
6.1.2. 轮询方式(Polling Mode)
CanDrv 由 SchM 触发并执行的后续流程。在这种情况下,必须在定义的时间间隔内Can_MainFunction_Write/Can_MainFunction_Read/Can_MainFunction_BusOff/Can_MainFunction_Wakeup/Can_MainFunction_Transceiver会被定期调用。当某个CAN控制器(CAN Controller)发生了接收、传输、Bus Off或者超时事件,CanDrv 会通知 CanIf模块。这等同于中断驱动操作模式。CanDrv负责更新CAN控制器(CAN Controller)中发生的事件对应的信息,例如:接收一个L-PDU。
6.1.3. 混合模式(Mixed Mode):中断和轮询驱动CanDrv
根据使用的CAN控制器(CAN Controller),功能可分为:中断驱动和轮询驱动操作模式。例如:通过轮询模式驱动的FullCAN的接收,通过中断模式驱动BasicCAN的接收;轮询模式驱动发送和中断模式驱动接收等。
CanIf 模块提供了一个唯一的接口,它对所有三种类型的操作模式都有效。总而言之,CanIf 以相同的方式工作,无论事件是在中断、周期任务还是混合模式中处理。唯一的区别是调用的上下文和可能的通知中断方式:抢先的(pre-emptive)或协同的(co-operative)。所有服务都按照配置执行。
6.2. 硬件对象句柄(HOH)
HOH硬件对象句柄(Hardware Object Handles)表示对CAN Mailbox结构的一种抽象引用。它可分为:用于传输的HTH和用于接收的HRH。它包含了CAN相关的一些参数,例如:CanId、DLC和数据(data)。基于CAN硬件缓冲区抽象,每个硬件对象(Hardware Object)在CanIf中引用,独立于CAN硬件缓冲区布局。HOH用做在调用CanDrv的接口服务中的参数,由CanDrv的配置提供,并由CanDrv 用作CAN Mailbox的通信缓冲区的标识符。
CanIf仅充当硬件对象句柄的使用者,但不根据硬件特定信息对其进行解释。因此保证了CanIf模块独立于硬件。
CanIf应避免直接访问特定于硬件的通信缓冲区,只能通过调用CanDrv接口服务来访问它,这样保证了CanIf独立于硬件。通过使用HOH作为参数调用CanDrv接口,从而这些参数从具体的CAN硬件缓冲区属性中抽象出来。 每个CAN控制器(CAN Controller)可以在CAN Mailbox中提供多个CAN传输硬件对象(CAN Transmit Hardware Objects)。这些可以逻辑链接到一个完整的硬件对象池(多路复用硬件对象),并通过一个HTH寻址定位。
CanIf可以使用两种类型的HOH来启用对CanDrv的访问:
- 硬件发送句柄 (HTH)
- 硬件接收句柄 (HRH)。
6.2.1. 硬件接收句柄 (HRH)
HRH是一个引用CAN控制器邮箱(CAN Controller mailbox)的逻辑硬件接收对象(Hardware Receive Object)的句柄。
HRH使CanIf能够通过BasicCAN或FullCAN接收方法来引用接收数据单元,并把接收到的L-SDU通知到目标的上层模块。
6.3. 静态 L-PDU
6.4. 动态 L-PDU
6.5. 物理通道视图
6.6. CAN硬件单元
6.7. BasicCAN 和 FullCAN 接收
CanIf区分 BasicCAN 和 FullCAN 处理以激活软件接受过滤。 用于 FullCAN 操作的 CAN 邮箱(硬件对象)仅启用单个 CanId 的传输或接收。 因此,一个硬件对象的 BasicCAN 操作能够发送或接收一系列 CanId。 用于配置的 BasicCAN 接收的硬件接收对象能够接收一系列 CanId,这些 CanId 通过其硬件接受过滤器。 此范围可能超出此 HRH 将接收的预定义 Rx L-PDU 列表。 因此,CanIf 随后应执行软件过滤以仅将预定义的 Rx L-PDU 列表传递给相应的上层模块。 更多详细信息请参见第 7.20 节“软件接收过滤器”。