1. 介绍
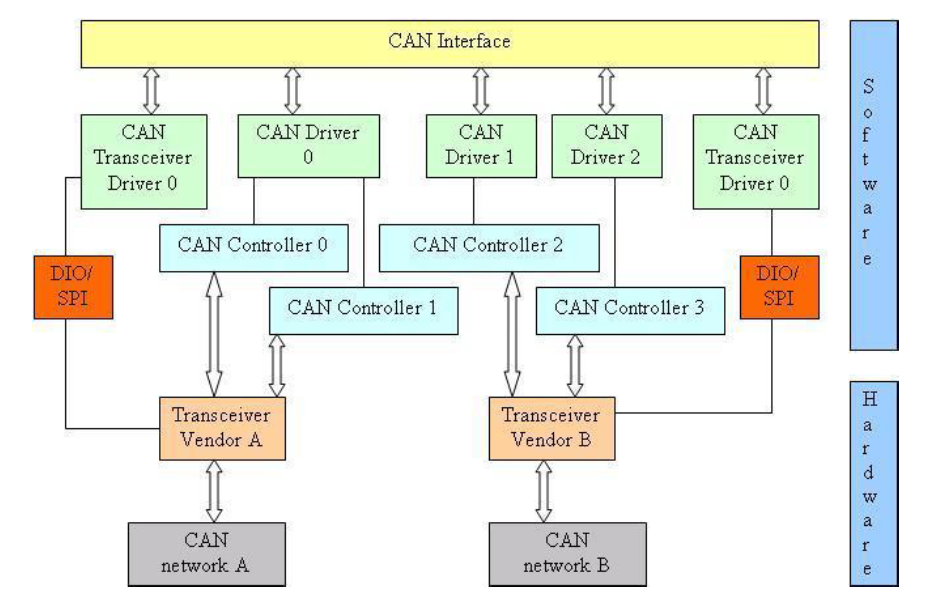
本规范描述了CAN收发器驱动模块(CAN Transceiver Driver)的功能、API 和配置。CAN收发器驱动模块负责处理ECU上的CAN收发器硬件芯片。
CAN收发器是一种硬件设备,它将CAN总线上使用的信号电平调整为微控制器识别的逻辑(数字)信号电平。
此外,收发器能够检测电气故障,如接线问题、接地偏移或长显性信号的传输。根据与微控制器的接口,它们标记由单个端口引脚检测到的错误或由SPI检测到的详细错误的汇总。
一些收发器支持电源控制和通过CAN总线的唤醒。市场上通常有不同的唤醒/睡眠和电源概念。
在汽车环境中,主要使用三种不同的CAN总线物理特性。这些是用于高速CAN(高达:1Mbits/s)的ISO11898,用于低速 CAN(高达:125Kbits/s)的ISO11519,和用于单线CAN的SAE J2411。
最新发展包括SBC系统基础芯片(System Basis Chips),其中除了CA 之外还实现了电源控制和高级看门狗。它们封装在一个外壳中,并通过单一接口(例如通过 SPI)进行控制。
1.1. CAN收发器驱动程序的目标
AUTOSAR CAN收发器驱动程序的目标是为适用于大多数当前和未来CAN收发器设备定义接口和行为。CAN收发器驱动程序抽象了CAN收发器硬件。它为更高层提供了一个独立于硬件的接口。 它通过使用MCAL层的API来访问CAN收发器硬件,以便实现ECU布局中的抽象化。
1.2. 明确未覆盖的CAN收发器功能
一些CAN总线收发器提供附加功能,例如:用于诊断的ECU自检或者错误检测功能。ECU自检和错误检测并未在AUTOSAR标准中定义,AUTOSAR所需要实现的功能主要锁定在大多数当前使用的收发器硬件芯片。因此,也不支持接地偏移检测(ground shift detection)、选择性唤醒(selective wake up)、斜率控制模式(slope control)等功能。
同时AUTOSAR也不支持根据SAE J2411的单线CAN功能。
2. 缩略语
ComM
Communication Manager
DEM
Diagnostic Event Manager
DET
Default Error Tracer
DIO
Digital Input Output (SPAL module)
EB
外部缓冲通道。位于SPI处理程序/驱动程序之外,包含要传输的数据的缓冲区。
EcuM
ECU State Manager
IB
内部缓冲通道。位于 SPI 处理程序/驱动程序内部,包含要传输的数据的缓冲区。
ISR
Interrupt Service Routine 中断服务程序
MCAL
Micro Controller Abstraction Layer
Port
Port module (SPAL module)
SBC
System Basis Chip 系统基础芯片。集成了例如 CAN 和/或 LIN 收发器、看门狗和电源控制。
SPAL
标准外设抽象
SPI Channel
一个通道是使用相同标准定义的软件数据交换介质。请参阅SPI驱动程序规范
SPI Job
一个作业由一个或多个具有相同片选的通道组成。作业被认为是原子的,因此不能被中断。 作业也具有指定的优先级。 有关详细信息,请参阅SPI驱动程序规范。
SPI Sequence
一个序列是要传输的多个连续作业。 序列取决于静态配置。 有关详细信息,请参阅 SPI 驱动程序规范。
CAN Channel
从 CAN 控制器通过 CAN 收发器连接到 CAN 网络的物理通道。
3. 相关文档
3.1. 输入文件
[1] List of Basic Software Modules
AUTOSAR_TR_BSWModuleList.pdf
[2] Layered Software Architecture
AUTOSAR_EXP_LayeredSoftwareArchitecture.pdf
[3] Specification of ECU Configuration
AUTOSAR_TPS_ECUConfiguration.pdf
[4] General Requirements on Basic Software
AUTOSAR_SRS_BSWGeneral.pdf
[5] Specification of Specification of CAN Interface
AUTOSAR_SWS_CANInterface.pdf
[6] Basic Software Module Description Template
AUTOSAR_TPS_BSWModuleDescriptionTemplate.pdf
[7] General Specification of Basic Software Modules
AUTOSAR_SWS_BSWGeneral.pdf
3.2. 相关标准和规范
[8] ISO11898 – Road vehicles - Controller area network (CAN)
4. 约束和假设
4.1. 限制
CAN总线收发器硬件需要提供可映射到AUTOSAR CAN收发器驱动程序的操作模式模型的功能和接口。
5. 对其他模块的依赖
5.1. CanIf
所有CAN收发器驱动程序都在CanIf模块下。
5.2. ComM
ComM通过CanIf控制CAN收发器驱动程序通信模式。每个CAN收发器驱动程序都是独立控制的。
5.3. DET
DET从CAN收发器驱动程序(CAN Transceiver Driver)中获取开发错误信息。
5.4. DEM
DEM从CAN收发器驱动程序(CAN Transceiver Driver)中获取生产错误信息。
5.5. DIO
DIO模块用于通过端口连接访问CAN收发设备(CAN transceiver device)。
5.6. EcuM
EcuM通过CanIf从CAN收发器驱动程序(CAN Transceiver Driver)获取有关唤醒事件的信息。
6. 功能规格
6.1. CAN收发器驱动操作模式
CanTrcv模块需实现如下所示的状态图,并独立于每个配置的收发器。
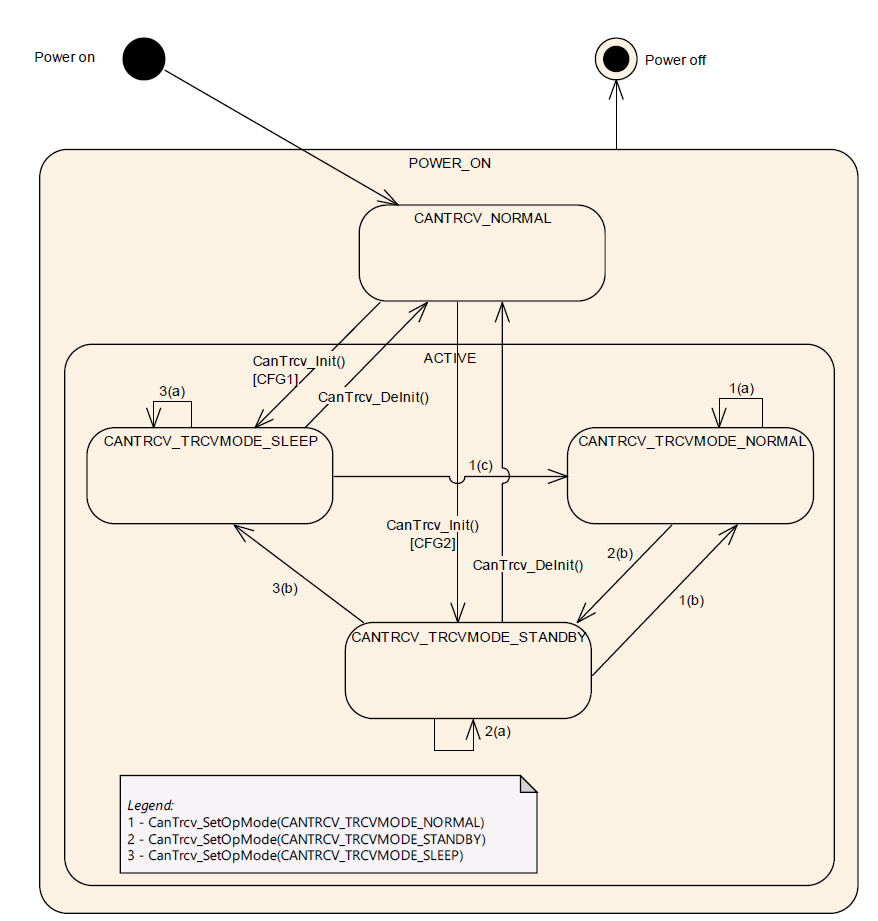
此图的主要思想是通过使用通用方案,来支持众多的迄今为止可用的CAN总线收发器。根据CAN收发器硬件的不同,模型可能具有超出给定 CAN收发器硬件所需的一个或两个状态,但这显然会将ComM和EcuM与使用的硬件分离。
1. POWER_ON
ECU已完全通电。
2. NOT_ACTIVE
CAN收发器硬件的状态取决于ECU硬件以及Dio和Port驱动程序配置。CAN收发器驱动程序未初始化,因此未激活。
3. ACTIVE
函数CanTrcv_Init已被调用。CAN收发器驱动程序进入活动状态。根据配置,CAN收发器驱动程序进入状态CANTRCV_TRCVMODE_SLEEP或CANTRCV_TRCVMODE_STANDBY。
4. CANTRCV_TRCVMODE_NORMAL
总线处于全通信。如果CAN收发器硬件控制ECU电源,则ECU完全供电。CAN收发器驱动程序未检测到进一步的唤醒信息。
5. CANTRCV_TRCVMODE_STANDBY
可能无通信。如果CAN收发器硬件控制ECU电源,ECU仍然供电。 仅在此模式下,才能到CANTRCV_TRCVMODE_SLEEP的转换。可以通过总线或本地唤醒事件唤醒。
6. CANTRCV_TRCVMODE_SLEEP
可能无通信。ECU可能没有电源,依赖于谁复杂电源控制。可以通过总线或本地唤醒事件唤醒。
函数CanTrcv_Init会使收发器的状态更改为CANTRCV_TRCVMODE_SLEEP或CANTRCV_TRCVMODE _STANDBY。这取决于配置,并且可以为每个收发器独立配置。
如果一个CAN收发器驱动程序覆盖多个CAN收发器(配置为通道),则所有收发器(通道)要么处于 NOT_ACTIVE状态,要么处于ACTIVE状态。在状态ACTIVE中,每个收发器可能处于不同的子状态。
6.1.1. 操作模式切换
可以通过调用函数CanTrcv_SetOpMode请求模式切换。允许对当前模式的模式切换请求,并且即使启用了DET,也不应该导致错误。
对于每次调用 CanTrcv_SetOpMode的模式切换请求,在到达请求的模式后,CanTrcv模块需要使用CanIf的TransceiverId引用相应的CAN收发器,调用回调函数CanIf_TrcvModeIndication通知上层模块。
6.2. CAN收发器硬件操作模式
实际的CAN收发器硬件可能支持比上面状态图中显示的更多的模式转换。此章节会解释了这种依赖关系和推荐的实现行为。
决定CAN收发器硬件状态通过CAN收发器驱动程序哪个软件状态覆盖是由具体实现决定的。同时实现也必须确保所描述的CAN收发器驱动程序软件状态的全部功能会由实现达成。
6.2.1. 临时进入睡眠(Go-To-Sleep)模式的示例
通常称为进入睡眠(Go-to-sleep)的模式是从正常切换到睡眠时的临时模式。驱动程序将这种临时模式封装在CAN收发器驱动程序软件状态之一中。 此外,CAN 收发器驱动程序首先从正常切换到待机,然后通过额外的 API 调用从待机切换到睡眠。
6.2.2. PowerOn/ListenOnly模式示例
通常称为PowerOn或ListenOnly的模式是CAN收发器硬件只能接收消息但不能发送消息的模式。此外,在接收消息期间确认位的发送被抑制。此模式不被支持,因为它不属于CAN标准,并且并非所有CAN收发器硬件芯片都支持。
6.3. CAN收发器唤醒类型
有三种不同的场景通常被称为唤醒:
场景一:
- MCU未通电。
- 包括CAN收发器硬件在内的部分ECU已上电。
- 所需考虑的CAN收发器处于SLEEP模式。
- CAN收发器硬件检测到CAN总线上的唤醒事件。
- CAN收发器硬件让MCU上电。
就AUTOSAR而言,这可以被认为是冷启动,而不是唤醒。
场景二:
- MCU处于低功耗模式。
- 包括CAN收发器硬件在内的部件ECU已上电。
- 所关心的CAN收发器处于待机(STANDBY)模式。
- CAN收发器硬件检测到CAN总线上的唤醒事件。
- CAN 收发器硬件会触发唤醒的软件中断(SW interrupt)。
就AUTOSAR而言,这可以被认为是CAN通道和MCU的唤醒。
场景三:
- MCU处于全功率模式。
- 至少包括CAN收发器硬件在内的部分ECU已上电。
- 所关心的CAN收发器处于待机(STANDBY)模式。
- CAN收发器硬件检测到CAN总线上的唤醒事件。
- CAN收发器硬件会使能唤醒事件的SW中断或者通过周期性轮询唤醒事件。
就AUTOSAR而言,这可以被认为CAN通道的唤醒。
6.4. 启用/禁用唤醒通知
CanTrcv驱动程序需要使用ICU驱动程序,提供的以下API来启用和禁用唤醒事件通知:
- Icu_EnableNotification
- Icu_DisableNotification
只有配置了参数CanTrcvIcuChannelRef,CanTrcv驱动程序才能启用/禁用ICU通道。
CanTrcv驱动程序需注意以下内容以避免唤醒事件的丢失:
- 当收发器转换到待机模式(CANTRCV_STANDBY)时,它需要启用ICU通道。
- 当收发器转换到正常模式 (CANTRCV_NORMAL) 时,它需要禁用ICU通道。
6.5. CAN收发器唤醒模式
CAN收发器驱动程序提供两种唤醒模式:NOT_SUPPORTED模式和POLLING模式
6.5.1. NOT_SUPPORTED模式
在NOT_SUPPORTED模式下,CAN收发器驱动程序不会产生唤醒。 所有CAN收发器硬件类型都支持此模式。
6.5.2. POLLING模式
在POLLING模式下,CAN收发器驱动程序产生的唤醒可能会导致CAN通道唤醒。在此模式下,无法唤醒MCU。该模式由需依赖使用的CAN收发器硬件类型。 POLLING唤醒模式会在函数CanTrcv_CheckWakeup和主函数CanTrcv_MainFunction中支持实现。
6.5.3. 唤醒模式处理
主函数CanTrcv_MainFunction由BSW调度程序调用,CanTrcv_CheckWakeup由CanIf模块调用。
唤醒模式的选择由配置参数CanTrcvWakeUpSupport实现。可以通过配置参数CanTrcvWakeupByBusUsed为每个单独CAN收发器的唤醒设置打开和关闭的支持。
注意:在这两种唤醒模式下,功能CanTrcv_CheckWakeup都需要存在,但功能应基于配置的唤醒模式(NOT_SUPPORTED或POLLING)。
在检测到唤醒后,如果CAN收发器需要由软件启动特定状态转换(例如:睡眠->正常),这可以由CanTrcv模块在执行CanTrcv_CheckWakeup期间完成,此行为是特定于实现的。
当收发器需要特定的状态转换时,必须通过配置这些涉及唤醒过程模块(EcuM、CanIf、ICU 等)来确保CanTrcv_CheckWakeup被调用。
6.6. 驱动程序初始化的前提条件
CanTrcv模块的环境应确保所有供CanTrcv模块使用的BSW驱动程序已被初始化,并且在调用CanTrcv_Init之前已可用。
CAN收发器驱动程序主要使用Spi和Dio驱动程序来控制CAN总线收发器硬件。因此在初始化CAN总线收发器驱动程序之前,这些驱动程序必须可用,并准备好运行。
CAN收发器驱动程序可能对初始化序列和对收发器设备的访问有时序要求,这些使用的底层驱动程序必须满足这些要求。对时序的要求可能包含:
- CAN总线收发器驱动程序初始化的调用必须在上电后尽快的执行,以便能够为ECU的所有其他应用及时地从收发器硬件中读取到所有必要的信息。
- 所使用的底层服务的运行时间需非常短并且是同步的,以使驱动程序能够满足自身硬件设备所需的时序需求地限制。
- 驱动程序的运行时间可能会由于某些硬件设备配置端口引脚电平有效而延长。例如:等待50μs后,再次更改引脚电平,以达到某特定状态(睡眠)。
6.7. 实例概念
对于每种不同的CAN收发器硬件类型,ECU都有一个CAN收发器驱动程序实例。这个实例服务于所有相同类型的CAN收发器硬件。
6.8. 等待状态
为了改变操作模式,CAN收发器硬件可能必须执行等待状态。
CAN收发器驱动程序需使用时间服务(Time service)的Tm_BusyWait1us16bit接口来实现收发器状态变化的等待时间。
6.9. 具有选择性唤醒功能的收发器
部分联网(Partial Networking)是CAN系统中的一种状态。在这种状态下,网络中的一些节点处于低功耗模式,而其他节点却保持通信。这降低了整个网络的功耗。处于低功耗模式的节点会被预定义的唤醒帧唤醒。
除了普通收发器提供的WUP唤醒模式(Wake Up Pattern)唤醒之外,支持选择性唤醒的收发器还可以通过WUF唤醒帧(Wake Up Frame)唤醒。
如果收发器硬件支持选择性唤醒,则可以通过配置参数CanTrcvHwPnSupport来使能。
选择性唤醒功能可通过配置容器(CanTrcvPartialNetwork)和以下API获得支持:
- CanTrcv_GetTrcvSystemData
- CanTrcv_ClearTrcvWufFlg
- CanTrcv_ReadTrcvTimeoutFlag
- CanTrcv_ClearTrcvTimeoutFlag
- CanTrcv_ReadTrcvSilenceFlag
但是仅当CanTrcvHwPnSupport = TRUE时才进行配置和调用。
如果支持选择性唤醒,则CAN收发器需配置参数CanTrcvPnFrameCanId、CanTrcvPnFrameCanIdMask和CanTrcvPnFrameDataMask 实现被特定 CAN帧或一组CAN帧唤醒。
如果收发器具有识别总线故障的能力(区分:总线故障和其他硬件故障),则可以使用配置参数CanTrcvBusErrFlag来实现总线故障诊断功能。
注意: 对于支持选择性唤醒功能的CAN收发器,可以在正常模式(CANTRCV_TRCVMODE_NORMAL)期间检测唤醒帧。检测到的唤醒帧由收发器 WUF Flag标识。 这可确保在转换到待机模式(CANTRCV_TRCVMODE_STANDBY)期间不会丢失唤醒帧。
7. API规范
7.1. 函数定义
7.1.1. CanTrcv_Init
说明: 初始化 CanTrcv 模块。
void CanTrcv_Init ( const CanTrcv_ConfigType* ConfigPtr )
7.1.2. CanTrcv_SetOpMode
说明: 将收发器的模式设置为值 OpMode。
Std_ReturnType CanTrcv_SetOpMode (
uint8 Transceiver, CanTrcv_TrcvModeType OpMode )
7.1.3. CanTrcv_GetOpMode
说明: 获取收发器的模式,并保存在OpMode中返回。
Std_ReturnType CanTrcv_GetOpMode (
uint8 Transceiver, CanTrcv_TrcvModeType* OpMode )
7.1.4. CanTrcv_GetBusWuReason
说明: 获取收发器的唤醒原因,并保存在参数Reason中返回。
Std_ReturnType CanTrcv_GetBusWuReason (
uint8 Transceiver, CanTrcv_TrcvWakeupReasonType* reason )
7.1.5. CanTrcv_VersionInfo
说明: 获取模块的版本并保存在VersionInfo中返回。
void CanTrcv_GetVersionInfo ( Std_VersionInfoType* versioninfo )
7.1.6. CanTrcv_SetWakeupMode
说明: 根据TrcvWakeupMode启用、禁用或清除收发器的唤醒事件。。
Std_ReturnType CanTrcv_SetWakeupMode (
uint8 Transceiver, CanTrcv_TrcvWakeupModeType TrcvWakeupMode )
7.1.7. CanTrcv_GetTrcvSystemData
说明: 读取收发器配置/状态数据,并通过参数TrcvSysData返回。 此API仅在CanTrcvHwPnSupport = TRUE时存在。
Std_ReturnType CanTrcv_GetTrcvSystemData (
uint8 Transceiver, uint32* TrcvSysData )
7.1.8. CanTrcv_ClearTrcvWufFlag
说明: 清除收发器硬件中的WUF标志。该API只有在CanTrcvHwPnSupport = TRUE时才存在。
Std_ReturnType CanTrcv_ClearTrcvWufFlag ( uint8 Transceiver )
7.1.9. CanTrcv_ReadTrcvTimeoutFlag
说明: 从收发器硬件读取超时标志的状态。该API只有在CanTrcvHwPnSupport = TRUE时才存在。
Std_ReturnType CanTrcv_ReadTrcvTimeoutFlag (
uint8 Transceiver, CanTrcv_TrcvFlagStateType* FlagState )
7.1.10. CanTrcv_ClearTrcvTimeoutFlag
说明: 清除收发器硬件中超时标志的状态。该API只有在CanTrcvHwPnSupport = TRUE时才存在。
Std_ReturnType CanTrcv_ClearTrcvTimeoutFlag ( uint8 Transceiver )
7.1.11. CanTrcv_ReadTrcvSilenceFlag
说明: 从收发器硬件读取沉默标志的状态。该API只有在CanTrcvHwPnSupport = TRUE时才存在。
Std_ReturnType CanTrcv_ReadTrcvSilenceFlag (
uint8 Transceiver, CanTrcv_TrcvFlagStateType* FlagState )
7.1.12. CanTrcv_CheckWakeup
说明: 在检测到唤醒中断的情况下,CanIf调用的服务。
Std_ReturnType CanTrcv_CheckWakeup ( uint8 Transceiver )
7.1.13. CanTrcv_SetPNActivationState
说明: 次API将收发器的唤醒配置为待机和睡眠模式,CAN收发器由远程唤醒模式(标准CAN唤醒)或配置的远程唤醒帧唤醒。
Std_ReturnType CanTrcv_SetPNActivationState (
CanTrcv_PNActivationType ActivationState )
7.1.14. CanTrcv_CheckWakeFlag
说明: 从收发器硬件请求检查唤醒标志的状态。
Std_ReturnType CanTrcv_CheckWakeFlag (uint8 Transceiver )
7.1.15. CanTrcv_DeInit
说明: 取消初始化CanTrcv模块。
void CanTrcv_DeInit ( void )
7.1.16. CanTrcv_MainFunction
说明: 用于扫描所有总线以查找唤醒事件并执行这些事件的服务。
void CanTrcv_MainFunction ( void )
7.1.17. CanTrcv_MainFunctionDiagnostics
说明: 定期读取收发器诊断状态并相应报告生产或开发的错误。
void CanTrcv_MainFunctionDiagnostics ( void )
微信扫一扫,获取更多及时资讯
