1. 简介和功能概述
本文介绍了AUTOSAR基础软件模块LIN驱动程序的功能、API和配置。
本文的基础是ISO 17987规范[16]。本文并不会再次描述ISO 17987规范中已有的LIN功能,而只会对AUTOSAR相关内容进行介绍。
LIN驱动适用于ISO 17987规范中主节点(master node)和从节点(slave node)。AUTOSAR中的LIN实现可能与ISO 17987规范中描述的LIN驱动程序有偏差,但LIN总线上的行为不会发生变化。它的目的是能够让所有现有的LIN节点在AUTOSAR LIN上重用。
LIN驱动模块的目的是支持从简单的SCI/UART到复杂LIN硬件控制器(LIN hardware controller)的全部LIN硬件。SW-UART不在此模块定义的范畴。
1.1. 体系结构概述
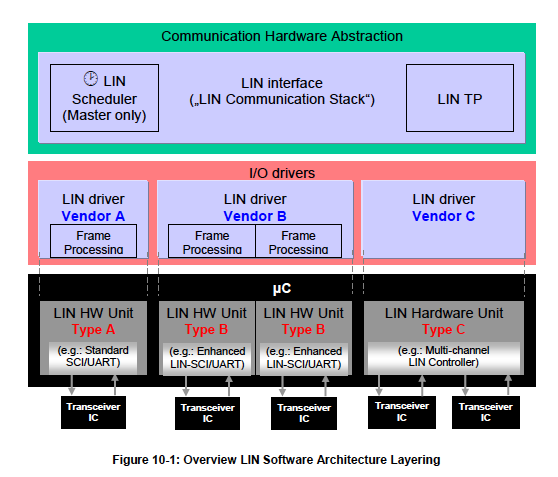
LIN驱动模块属于微控制器抽象层(MCAL)的一部分,它主要实现了执行硬件访问,并为上层模块提供一个硬件独立的API。唯一能够访问LIN驱动程序的上层是LIN接口(LINIf)模块。
LIN驱动模块可以支持多个通道。这意味着LIN驱动模块可以处理一个或多个LIN通道,只要它们属于同一个LIN硬件单元。
在下面的例子中,三个不同的LIN驱动程序被连接到一个LIN接口(LIN interface)。然而单个LIN驱动是最常见的配置。
2. 缩略语和术语表
2.1. 缩略语
| 缩略语 | 说明 |
|---|---|
| ISR | Interrupt Service Routine |
| LIN | Local Interconnect Network |
| MCAL | MicroController Abstraction Layer |
| PDU | Protocol Data Unit. Consists of Identifier, data length and Data (SDU) |
| PID | Protected ID |
| PLL | Phase-Locked Loop |
| RX | Reception |
| SCI | Serial Communication Interface |
| SDU | Service Data Unit. Data that is transported inside the PDU |
| SFR | Special Function Register |
| SPAL | Standard Peripheral Abstraction Layer |
| TP | Transport Layer |
| TX | Transmission |
| UART | Universal Asynchronous Receiver Transmitter |
2.2. 术语表
| 术语 | 英文参考 | 说明 |
|---|---|---|
| LIN通 | LIN Channel | LIN通道实体在物理上连接LIN集群的ECU。如果一个ECU包含一个LIN控制器,并且与LIN集群上的一个LIN通道相连,那么ECU就是这个LIN集群上的一部分。一个ECU只能通过一个通道连接到一个特定的LIN集群。 |
| LIN集群 | LIN cluster | 一个集群是LIN总线加上线上所有的节点。 |
| LIN控制器 | LIN controller | 一个专用的LIN硬件,带有一个构建Frame处理状态机。能够连接到多个LIN集群的硬件应该被视为多个LIN控制器。 |
| LIN帧 | LIN frame | 所有信息以帧的形式发送。一个帧由报头和响应部分组成。 |
| LIN帧处理器 | LIN frame processor | 帧处理意味着完整的LIN帧处理。实现可以是软件仿真解决方案或一个专用LIN控制器。 |
| LIN硬件单元 | LIN hardware unit | LIN硬件单元可以驱动一个或多个LIN通道来控制一个或多个LIN集群。 |
| LIN报头 | LIN header | 报头是帧的第一部分,总是通过主节点来发送。 |
| LIN节点 | LIN node | 简单地说,一个节点就是一个ECU。但是单个ECU可以连接到多个LIN集群。 |
| LIN响应 | LIN response | LIN帧由报头和响应组成,因此LIN响应也被称为帧响应。 |
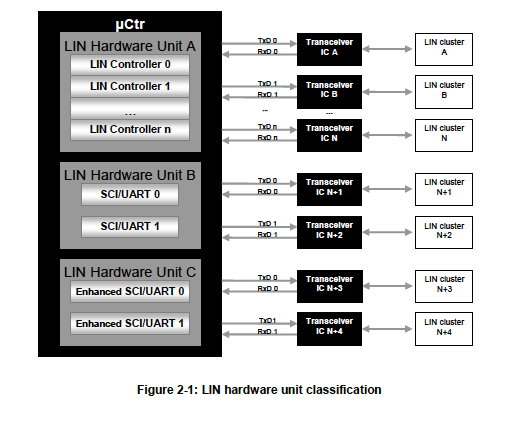
2.3. LIN硬件单元分类
片载的LIN硬件单元由一个或几个LIN通道组成。
下图是连接到多个LIN物理通道的不同LIN硬件类型的分类:
3. 相关的文档
3.1. 输入文档
[1] List of Basic Software Modules
AUTOSAR_TR_BSWModuleList.pdf
[2] Layered Software Architecture
AUTOSAR_EXP_LayeredSoftwareArchitecture.pdf
[3] General Requirements on Basic Software Modules
AUTOSAR_SRS_BSWGeneral.pdf
[4] Specification of Standard Types
AUTOSAR_SWS_StandardTypes.pdf
[5] Specification of Default Error Tracer
AUTOSAR_SWS_DefaultErrorTracer.pdf
[6] General Requirements on SPAL
AUTOSAR_SRS_SPALGeneral.pdf
[7] Requirements on LIN
AUTOSAR_SRS_LIN.pdf
[8] Specification of LIN Interface
AUTOSAR_SWS_LINInterface.pdf
[9] Specification of ECU Configuration
AUTOSAR_TPS_ECUConfiguration.pdf
[10] Specification of MCU driver
AUTOSAR_SWS_MCUDriver.pdf
[11] Specification of Diagnostic Event Manager
AUTOSAR_SWS_DiagnosticEventManager.pdf
[12] Specification of ECU State Manager
AUTOSAR_SWS_ECUStateManager.pdf
[13] Basic Software Module Description Template
AUTOSAR_TPS_BSWModuleDescriptionTemplate.pdf
[14] Specification of LIN Transceiver Driver
AUTOSAR_SWS_LINTransceiverDriver.pdf
[15] General Specification of Basic Software Modules
AUTOSAR_SWS_BSWGeneral.pdf
3.2. 相关标准及规范
[16] LIN Specification Package Revision 2.1, November 24, 2006
http://www.lin-subbus.org/
3.3. 相关的规范
AUTOSAR提供了基础软件模块[15]的通用规范,它也适用于LIN驱动模块。因此,AUTOSAR_SWS_BSWGeneral.pdf通用规范应被视为LIN驱动模块的附加和必需的规范。
4. 约束和假设
4.1. 限制
一个ECU只能有一个LIN通道连接到特定的LIN集群。除非ECU中有未使用(即:未连接)的通道,否则LIN通道数等于LIN集群的数量。
一个LIN驱动程序提供对一个LIN硬件单元类型(简单的UART或专用LIN硬件)的访问,但这个LIN硬件单元却可能由几个LIN通道组成。对于不同的LIN硬件单元,需要实现一个单独的LIN驱动程序。并由实现者来调整驱动程序以适应类似LIN通道的不同实例。
如果在一个ECU中,实现了几个LIN驱动程序实例(来自相同或不同的供应商),那么文件名、API名称和发布的参数必须进行修改,以达到不会生成两个具有相同名称的定义。名称应带有一个Vendor Id(将不同厂商区的LIN驱动程序区分开来)和一个Vendor特定名称(将同一个厂商实现的不同硬件单元区分开来)。格式如下:<Module abbreviation>_<Vendor Id>_<Vendor specific name>。同时LIN接口负责调用正确的函数。
4.2. 对汽车领域的适用性
此规范适用于所有使用LIN的汽车领域。
5. 对其他模块的依赖关系
5.1. MCU
LIN内部硬件单元的硬件取决于系统时钟(system clock)、预分频器(prescaler)和锁相环(PLL)。因此LIN发送每条帧时间长度取决于模块MCU的时钟设置。
LIN驱动模块不会在它的初始化函数中负责配置时钟、预分频器和PLL的寄存器(例如打开/关闭PLL)。MCU模块必须做到这一点。
5.2. Port
端口(Port)驱动程序用于配置LIN驱动程序所需的输入、输出的端口引脚。因此在使用LIN函数之前,必须先初始化Port驱动程序。否则LIN驱动函数将表现出未定义的行为。
5.3. DET(Default Error Tracer)
在开发模式下,Lin模块通过模块DET的Det_ReportError函数报告开发错误。
5.4. DEM(Diagnostic Event Manager)
Lin模块向诊断事件管理器(DEM)报告生产错误。
5.5. OS(Operating System)
LIN驱动程序使用中断,因此依赖于配置中断源的操作系统。
5.6. LIN驱动程序用户
LIN接口(由[8]定义)是LIN驱动服务的唯一用户。
6. 功能规范
LIN驱动程序模块需要通过连接到驱动程序所在节点的任何LIN集群来管理通信的硬件相关方面。这包括接收传输到总线上的报头数据、传输的响应帧数据、以及取回报头信息和节点的响应帧数据。 节点和集群都需要睡眠模式管理。这意味着检测和产生LIN 2.1规范中定义的唤醒脉冲(wake-up pulse)的能力。如果底层硬件支持低功耗模式,则也包括进入和退出低功耗模式的状态。
6.1. 一般需求
LIN模块是一个基本软件模块,它可以直接访问硬件资源。
LIN模块应符合[16]中规定的Lin 2.1协议规范。它只适用于LIN 2.1主节点。作为从节点运行超出了AUTOSAR LIN驱动程序规范的范围。
LIN模块应实现所有LIN硬件单元中断所需的ISR,确保所有未使用的中断都被禁用。LIN模块也需要在ISR结束时,重置中断标志(如果不是由硬件自动完成的话)。
6.2. LIN驱动程序和通道初始化
在LIN总线上开始通信之前,LIN驱动程序和相关的LIN通道都必须初始化。
LIN驱动程序初始化(参见Lin_Init)通过LIN硬件单元,负责对所有LIN通道相关的方方面面进行初始化。这可能包含对所有LIN通道的任何静态变量或硬件寄存器设置。此外,每个通道也必须根据提供的配置进行初始化。例如:包括(但不限于)总线上的波特率值。
LIN驱动程序必须至少有一个静态定义的配置集可用。当EcuM调用初始化函数时,它必须提供一个特定的指针,指向它希望使用的配置。
Lin模块不应该初始化或配置没有被使用Lin通道。同时Lin模块也应该允许在运行期间,选择不同的静态配置数据。
Lin模块的配置应包括数据通信速率(data communication rate)设置的静态配置数据。Lin模块的用于硬件寄存器的配置数据,应该作为硬件特定的数据结构存储在ROM中。
每个LIN的PID应该与一个校验和模型相关联,要么是增强的(enhanced),即PID包含在校验和中,要么是经典的(classic),即仅对响应数据进行校验和。每个LIN的PID应该与响应数据字节长度相关联。
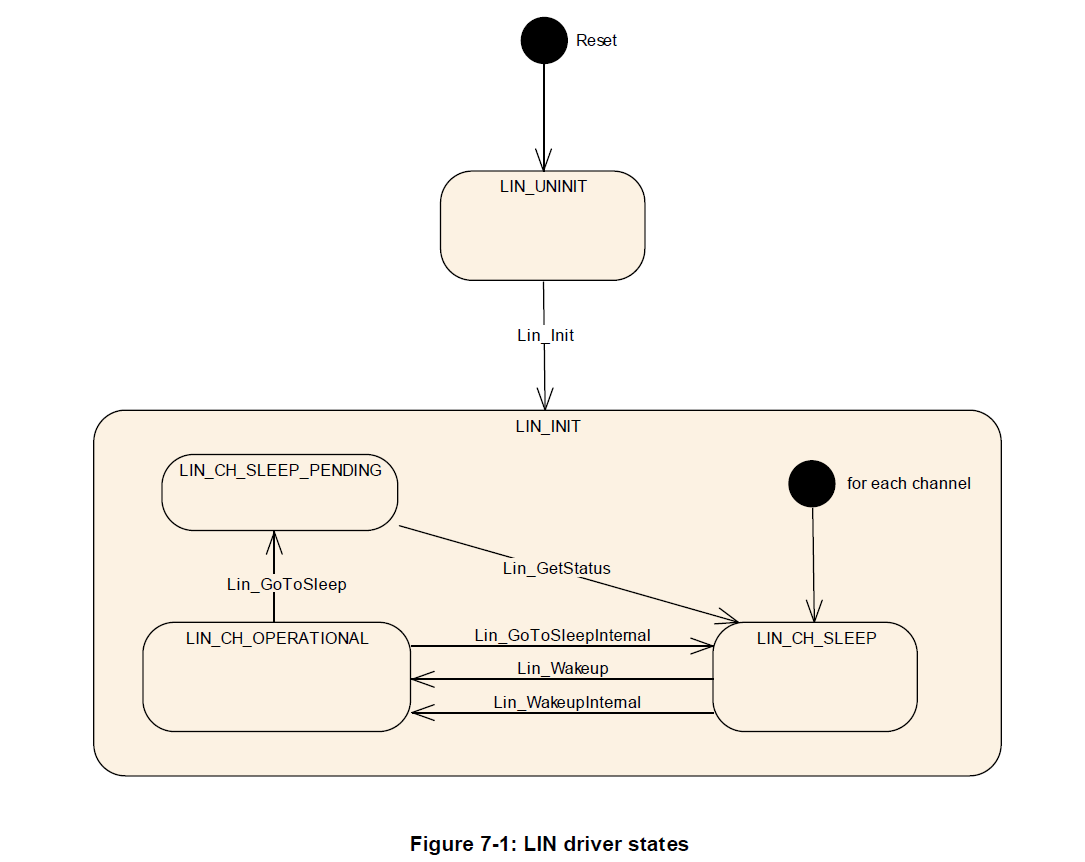
6.3. 状态图
LIN驱动程序的状态机如图7-1所示。
| 状态 | 含义及此状态下活动 |
|---|---|
| LIN_UNINIT | LIN_UNINIT状态表明Lin模块还没有初始化,暂时不能使用。 |
| LIN_INIT | LIN_INIT状态表明LIN驱动程序已经初始化,每个可用通道都可以使用。 |
- Reset -> LIN_UNINIT:复位后,Lin模块将其状态设置为LIN_UNINIT.
- LIN_UNINIT -> LIN_INIT:当Lin_Init函数被调用时,Lin模块从LIN_UNINIT过渡到LIN_INIT。同时LIN模块的环境在运行时只允许调用Lin_Init函数一次。
| 通道状态 | 含义及此状态下活动 |
|---|---|
| LIN_CH_OPERATIONAL | 单个通道已经被初始化(至少一个静态配置的数据集已使用),并且能够参与LIN集群。 |
| LIN_CH_SLEEP | 唤醒脉冲的检测被启用。如果LIN硬件提供低功耗模式,则LIN硬件进入低功耗模式 |
- 在进入状态LIN_INIT时,Lin模块需要将每个通道设置为状态LIN_CH_SLEEP,开启唤醒检测(依赖配置字LinChannelWakeupSupport)。如果硬件支持低功耗,并可选择将Lin硬件单元设置为低功耗运行模式。
- LIN_CH_OPERATIONAL -> LIN_CH_SLEEP_PENDING(Lin_GoToSleep):如果LIN接口请求go to sleep, LIN模块应确保LIN集群的其他部分也都进入sleep状态。这是通过在进入LIN_CH_SLEEP_PENDING状态之前在总线上发出一个go-to-sleep-command来实现的。
- LIN_CH_SLEEP_PENDING -> LIN_CH_SLEEP:当调用Lin_GetStatus时,LIN驱动将直接进入LIN_CH_SLEEP状态,即使go-to-sleep命令还没有发送。
- LIN_CH_OPERATIONAL -> LIN_CH_SLEEP(Lin_GoToSleepInternal):如果LIN接口请求内部go to sleep, LIN驱动将直接进入LIN_CH_SLEEP状态。
- LIN_CH_SLEEP -> LIN_CH_OPERATIONAL(Lin_Wakeup): 如果LIN通道处于LIN_CH_SLEEP状态,则调用Lin_Wakeup函数将使LIN通道置于LIN_CH_OPERATIONAL状态。
- LIN_CH_SLEEP -> LIN_CH_OPERATIONAL(Lin_WakeupInternal): 如果LIN通道处于LIN_CH_SLEEP状态,则调用Lin_WakeupInternal函数将使LIN通道置于LIN_CH_OPERATIONAL状态。
- Lin_Wakeup:在状态从LIN_CH_SLEEP过渡到LIN_CH_OPERATIONAL期间,LIN驱动程序应确保集群的其余部分处于唤醒状态。这是通过发出唤醒请求来实现的,迫使总线在250μs到5ms的时间内处于显性电平状态。
- 允许切换到当前模式的模式切换请求(mode switch request),且不应导致错误,即使DET已启用。
6.4. 帧处理
6.4.1. 背景和理论基础
从LIN驱动模块的角度来看,数据传输由两个动作组成:LIN报头的传输以及响应的传输。只有LIN的主节点才能发送LIN报头,但是无论是主节点还是从节点都可以发送响应数据。
驱动程序还必须能够访问关于每个LIN的PID的校验和模型(checksum model)和数据长度等数据。与LIN1.3标志相比,LIN 2.1有一个不同的校验和模型,但是LIN 2.1主节点应该能够同时与LIN1.3和LIN 2.1从节点通信。
校验和是响应的一部分。根据PID的校验和模型,它可能包括PID,也可能不包括PID。但LIN ID为60 (0x3c)到63 (0x3f)的帧,必须始终使用经典的(classic)校验和模型,即校验和仅包含响应数据部分。
LIN驱动模块使用LIN帧作为其基本数据块构件。这意味着LIN接口层必须在其调度程序的一个时隙中(scheduler time-slots)才能请求发送特定的帧。任何来自帧的响应都应该在下一帧被发送之前确保是可用的。
在主节点也负责发送帧响应的情况下,在请求发送报头的同时会给出一个指示(PduInfoPtr->Drc=LIN_MASTER_RESPONSE)。响应本身的传输必须随后由另一个函数调用触发。
LIN驱动模块必须能够从响应中获取数据,并使其可用于LIN接口模块。它必须在不阻塞的情况下从响应中获取所有数据。
6.4.2. 需求
LIN驱动程序将使用PID来做提供的标识符。然后在LIN报头中按提供的方式传输标识符。(参见:Lin_SendFrame)
LIN驱动程序应该能够发送LIN的报头。它由同步间隔域(Break Field)、同步域(Sync Byte Field)和受保护ID域(Protected Identifier Field)组成,详细信息见[16]。(参见:Lin_SendFrame)。
LIN驱动应该能够发送LIN报头和响应。同时LIN驱动程序应该能够计算经典的(classic)或增强的(enhanced)两种校验和,这取决于当前LIN PDU的校验和模型。
如果LIN接口请求一个新的帧传输时,正在传输的帧可能仍在进行中或者未能成功完成传送,LIN驱动程序应该中止当前的帧传输。
Lin_GetStatus函数需返回当前信道帧传输请求的状态。
LIN驱动程序应使接收到的数据对LIN接口模块可用。成功接收整个LIN帧后,将接收到的数据准备好,并提供给LIN接口的函数调用。
LIN驱动程序需能发送由LIN接口模块提供的响应数据(参见:Lin_SendFrame)。
如果LIN硬件单元不能为传输或接收数据缓存到排队中(例如:简单的UART实现),LIN驱动程序应该提供一个临时通信缓冲区。
LIN驱动程序应该在不阻塞的情况下开始传输,包括只有在成功接收到前一个字节后才检查下一个字节的传输情况(receive-back)。LIN驱动器在接收数据时也不应该被阻塞。
6.4.3. 发送数据的一致性
LIN驱动程序应该直接从上层缓冲区复制数据。LIN驱动的上层模块必须保持缓冲区数据的一致性,直到函数调用返回。
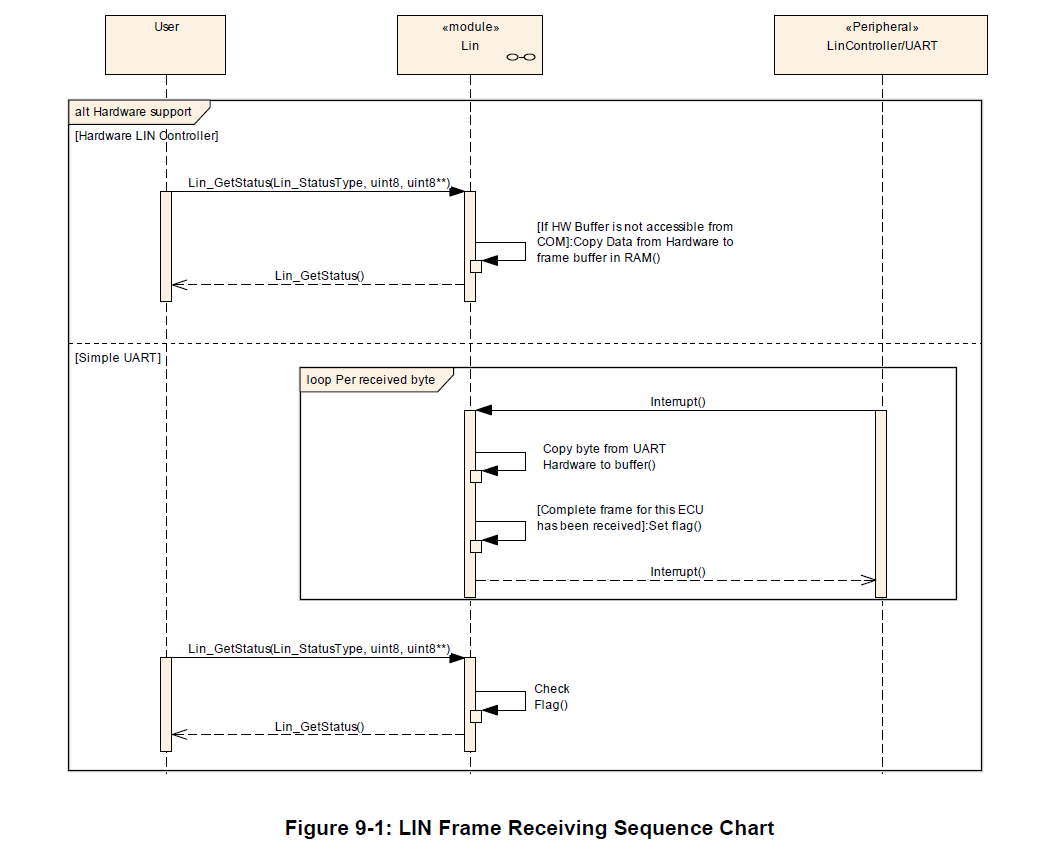
6.4.4. 接收数据的一致性
完整的LIN帧接收处理(包括复制到目标层)可以在ISR中实现。在成功接收到下一个LIN帧或LIN通道状态发生改变之前,接收到的数据应该是一致的。
完整的LIN帧接收处理(包括复制到目标层)也可以在Lin_GetStatus函数中实现。在成功接收到下一个LIN帧或LIN通道状态发生改变之前,接收到的数据应该是一致的。
只要保证ISR和Lin_GetStatus都不能被自己中断,LIN的硬件缓冲区或者镜像缓冲区(shadow buffer)总是一致的。因为它是在一个函数中按顺序写入和读取的,只需这个函数永远不会被自己打断。
对于LIN响应接收,SDU缓冲区需分配一块连续递增的内存地址空间。LIN帧数据长度信息也定义了SDU缓冲区的最小长度。
6.4.5. 数据字节映射
内存和LIN帧之间的数据映射如下:
- 数组元素0包含LSB(首先发送/接收的数据字节)。
- 数组元素n-1包含MSB(最后发送/接收的数据字节)。
6.5. 睡眠和唤醒
主节点可以被一个从节点产生的唤醒信号唤醒,也可以被上层模块(LIN接口)的请求唤醒。LIN接口模块控制消息调度表,因此必须能够指示LIN驱动程序将硬件单元置于睡眠状态,或者唤醒硬件单元。所以LIN驱动程序需提供了将LIN通道置于其LIN_CH_SLEEP状态的函数供调用。
在睡眠或唤醒时,主节点必须将状态变化与网络的其他节点进行通信。
当LIN通道进入睡眠模式时,如果LIN硬件单元的低功耗模式,则LIN驱动程序需执行LIN硬件单元的低功耗模式转换。同时每个LIN通道应该能够独立于其他通道状态接受一个睡眠请求(参见:Lin_GoToSleep/Lin_GoToSleepInternal)
当LIN通道处于LIN_CH_SLEEP状态,并且配置参数LinChannelWakeupSupport支持唤醒检测时,LIN硬件单元应该监控总线以获取该通道上的唤醒请求。
如果LIN驱动程序收到LIN接口模块的唤醒请求,被请求的通道将向LIN总线发送唤醒脉冲。(参见:Lin_Wakeup)
如果LIN驱动程序收到LIN接口模块的内部唤醒请求,则被请求的通道不向LIN总线发送唤醒脉冲。(参见:Lin_WakeupInternal)
函数Lin_GetStatus返回给定LIN通道的当前状态。
7. API规范
7.1. 函数定义
7.1.1. Lin_Init
说明: 初始化LIN模块。
void Lin_Init( const Lin_ConfigType* Config )
7.1.2. Lin_CheckWakeup
说明: 这个函数检查在指定的LIN通道上是否发生了唤醒。
Std_ReturnType Lin_CheckWakeup( uint8 Channel )
7.1.3. Lin_GetVersionInfo
说明: 返回此模块的版本信息。
void Lin_GetVersionInfo( Std_VersionInfoType* versioninfo )
7.1.4. Lin_SendFrame
说明: 如果需要发送LIN报头和LIN响应。帧响应的方向:主节点响应、从节点响应、从节点和从节点的通信,由PduInfoPtr提供。
Std_ReturnType Lin_SendFrame( uint8 Channel, const Lin_PduType* PduInfoPtr )
7.1.5. Lin_GoToSleep
说明: 该服务指示驱动程序在指定的LIN通道上发送一个“进入休眠”命令。
Std_ReturnType Lin_GoToSleep( uint8 Channel )
7.1.6. Lin_GoToSleepInternal
说明: 将通道状态设置为LIN_CH_SLEEP,启用唤醒检测,并可选择将LIN硬件单元设置为降低功耗的运行模式(如果HW支持)。
Std_ReturnType Lin_GoToSleepInternal( uint8 Channel )
7.1.7. Lin_Wakeup
说明: 生成一个唤醒脉冲并将通道状态设置为LIN_CH_OPERATIONAL。
Std_ReturnType Lin_Wakeup( uint8 Channel )
7.1.8. LIN_WakeupInternal
说明: 将通道状态设置为LIN_CH_OPERATIONAL,而不产生唤醒脉冲。
Std_ReturnType Lin_WakeupInternal( uint8 Channel )
7.1.9. Lin_GetStatus
说明: 获取LIN驱动程序的状态。
Lin_StatusType Lin_GetStatus( uint8 Channel, uint8** Lin_SduPtr )
微信扫一扫,获取更多及时资讯
