1. 简介和功能概述
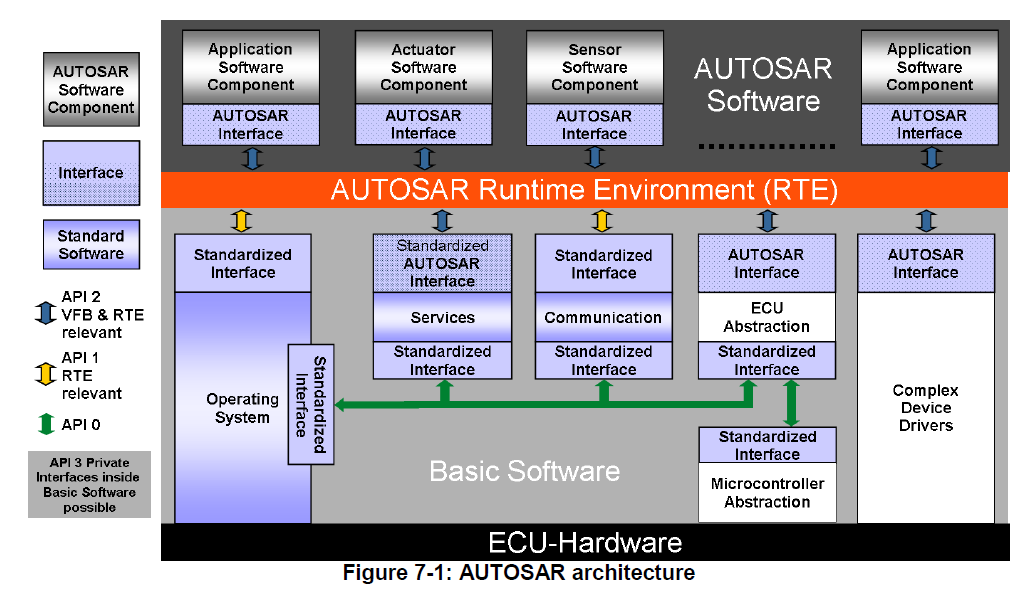
本文介绍了AUTOSAR基础软件I/O硬件抽象(I/O Hardware Abstraction)的功能和配置。I/O硬件抽象是ECU抽象层(ECU Abstraction Layer)的一部分。
I/O硬件抽象不应被视为单个模块,实现上此模块可以被实现为多个模块。 AUTOSAR的I/O硬件抽象标准并未为了实现模块或模块组的标准化。 相反标准的主要是为实现和其他模块的功能之间接口的指南。
I/O硬件抽象的目的是通过将I/O硬件抽象端口映射到ECU信号来提供对MCAL驱动程序的访问。提供给软件组件的数据可以完全从物理层中抽象出来。因此,软件组件设计人员不再需要详细了解MCAL驱动程序的API和物理层数据值的单位。
I/O硬件抽象始终针对ECU的特定实现,软件组件(software component)对基础软件(basic software)的需求必须适用具体MCAL实现的特征。
I/O硬件抽象需提供初始化整个I/O硬件抽象的服务。
在AUTOSAR的I/O硬件抽象指南中包含:
- 在定义I/O硬件抽象时,应使用软件组件模板(Software Component template)的哪一部分。
- 解释如何定义用于ECU信号映射的通用端口的方式。
在AUTOSAR的I/O硬件抽象指南中不包含:
- 提供C语言的API的定义
- 为每个ECU信号提供特定的形式化。此信息可在(车身域、动力总成、底盘域)的标准化的通过功能数据中找到。
2. 缩略语及术语
2.1. 缩略语
BSW
基础软件(Basic SoftWare)
BSWMD
基本软件模块说明(Basic SoftWare Module Description)
DET
默认错误跟踪器(Default Error Tracer)
IoHwAb
输入/输出硬件抽象(Input/Output Hardware Abstraction)
ISR
中断服务程序(Interrupt Service Routine)
MCAL
微控制器抽象层(MicroController Abstraction Layer)
SWC
软件组件(SoftWare Component)
2.2. 术语
Callback
术语回调函数(Callback)主要用于API服务,实现通知其他BSW模块。
Callout
Callout是一种函数Stub。主要在配置时进行填写,目的是向提供Callout函数的模块添加功能。
Class
一个类(Class)代表一组具有相似电气特性的信号。如:模拟类(Analogue class)
Client-Server communication
客户端-服务器通信(Client-Server communication)涉及两个实体。客户端是要求服务的一方,服务器是提供服务的一方。客户端发起通信,请求服务器执行服务,必要时传输参数集合。服务器以RTE的形式,等待来自客户端的传入通信请求,执行请求的服务并发送对客户端请求的响应。因此服务启动的方向是用来对AUTOSAR软件组件是客户端还是服务器分类的主要标识。
Sender-receiver communication
发送方-接收方通信涉及原子数据元素组成的信号的发送和接收,这些原子数据元素由一个组件发送给另一个或多个组件。发送方-接收方接口可以包含多个数据元素。发送方-接收方通信是单向的 接收方发送的任何回复都可以视为一个单独的发送方-接收方通信。接收方组件的端口可以读取接口描述定义的数据元素,而提供方组件的端口可以按照接口描述定义写入数据元素。
Electrical Signal
电信号(Electrical Signal)代表ECU引脚上的物理信号。
ECU pin
ECU引脚(ECU pin)是ECU与电子系统其余部分的电气硬件连接。
ECU Signal
ECU信号(ECU Signal)是电信号的软件表示。一个ECU信号具有一些属性(Attribute)和一个符号名称(Symbolic name)。
ECU Signal Group
ECU信号组(ECU Signal Group)是一组电信号的软件表示。
Attributes
属性(Attributes)是ECU中存在的每个ECU信号所包含的软件或者硬件特性。一些属性是固定的,由端口定义决定。还有一些属性是可以在I/O硬件抽象中进行配置的。
Symbolic name
ECU信号的符号名称(Symbolic name)在I/O硬件抽象模块中是用来建立链接的。(包括:功能、引脚等)
2.3. ECU信号属性
Range
范围(Range)在这里是一个功能范围(functional range),而不是电气范围(electrical range)。所有范围都用于功能的需要或者诊断的检测。对于模拟ECU信号,可以定义上下限值 [lowerLimit…upperLimit](电压、电流)。对于电阻信号和时序信号(周期)的特殊情况,下限值(lowerLimit)不能为负。
Resolution
分辨率(Resolution)属性适用于依赖于范围和数据类型的许多类别。如:(upperLimit - lowerLimit) / (2datatypelength -1)。 对于其他类别,它可能是已知和被定义的。如:[-12 Volts…+12Volts],数据类型: 16 bits,Resolution 为 24 / 65535。
Accuracy
精度(Accuracy)取决于用于采样或者生成的硬件外围设备。如:ADC转换器可以是 8/10/12/16 位转换器
Inversion
物理值与逻辑值的反转(Inversion)。此属性不可见,但可以由I/O硬件抽象来实现,并向用户传递预期值。
Sampling rate
采样率(Sampling rate)是获得信号值所需的时间段。
3. 相关文档
3.1. 输入文件
[1] List of Basic Software Modules
AUTOSAR_TR_BSWModuleList.pdf
[2] Layered Software Architecture
AUTOSAR_EXP_LayeredSoftwareArchitecture.pdf
[3] General Requirements on Basic Software Modules
AUTOSAR_SRS_BSWGeneral.pdf
[4] Specification of ECU Configuration
AUTOSAR_TPS_ECUConfiguration.pdf
[5] Glossary
AUTOSAR_TR_Glossary.pdf
[6] General Requirements on SPA
AUTOSAR_SRS_SPALGeneral.pdf
[7] Requirements on I/O Hardware Abstraction
AUTOSAR_SRS_IOHWAbstraction.pdf
[8] Software Component Template
AUTOSAR_TPS_SoftwareComponentTemplate.pdf
[9] Specification of RTE Software
AUTOSAR_SWS_RTE.pdf
[10] Specification of ECU State Manager
AUTOSAR_SWS_ECUStateManager.pdf
[11] Specification of ECU Resource Template
AUTOSAR_TPS_ECUResourceTemplate.pdf
[12] Specification of ADC Driver
AUTOSAR_SWS_ADCDriver.pdf
[13] Specification of DIO Driver
AUTOSAR_SWS_DIODriver.pdf
[14] Specification of ICU Driver
AUTOSAR_SWS_ICUDriver.pdf
[15] Specification of PWM Driver
AUTOSAR_SWS_PWMDriver.pdf
[16] Specification of PORT Driver
AUTOSAR_SWS_PORTDriver.pdf
[17] Specification of GPT Driver
AUTOSAR_SWS_GPTDriver.pdf
[18] Specification of SPI Handler/Driver
AUTOSAR_SWS_SPIHandlerDriver.pdf
[19] Basic Software Module Description Template
AUTOSAR_TPS_BSWModuleDescriptionTemplate.pdf
[20] Specification of Standard Types
AUTOSAR_SWS_StandardTypes.pdf
[21] General Specification of Basic Software Modules
AUTOSAR_SWS_BSWGeneral.pdf
[22] Specification of OCU Driver
AUTOSAR_SWS_OCUDriver.doc
3.2. 相关规范
AUTOSAR标准提供了基础软件模块的通用规范 [21],此文档也适用于IO 硬件抽象模块。因此规范[21]也应被视为IO硬件抽象的附加和必需的规范。
4. 对其他模块的依赖
4.1. 与MCAL驱动程序的接口
4.1.1. 概述
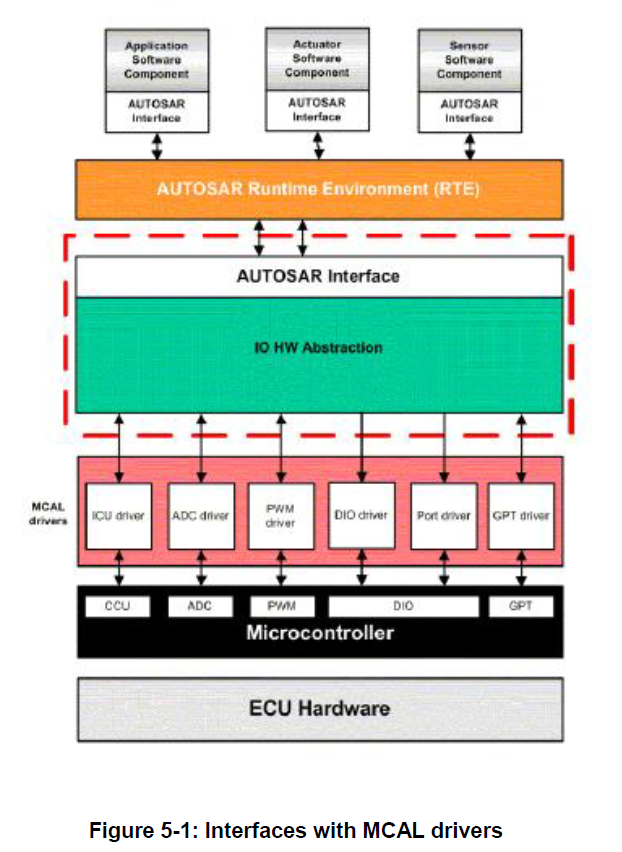
下图显示了I/O硬件抽象模块。它位于MCAL驱动程序之上。这意味着I/O硬件抽象模块将调用驱动程序的API来管理片载设备。MCAL驱动程序的配置取决于SWC所需的ECU信号的质量。例如:当引脚电平发生相关变化(上升沿、下降沿)时,可能需要发出通知。系统设计人员必须配置MCAL驱动程序以允许通知给定信号。 通知由MCAL驱动程序生成并在I/O硬件抽象模块中处理。
注意,I/O硬件抽象模块并非为了抽象GPT功能,而是使用GPT功能来执行自己的功能。下图显示了I/O硬件抽象模块与GPT驱动程序的接口,GPT驱动程序是MCAL的一部分。
4.1.2. 与MCAL驱动程序的接口摘要
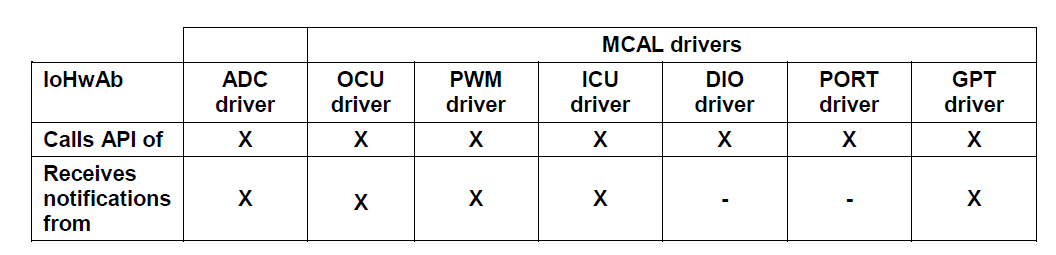
- I/O硬件抽象调用ADC驱动程序的API
- I/O硬件抽象接收来自ADC驱动程序的通知。
- I/O硬件抽象不接收来自DIO驱动程序的通知。
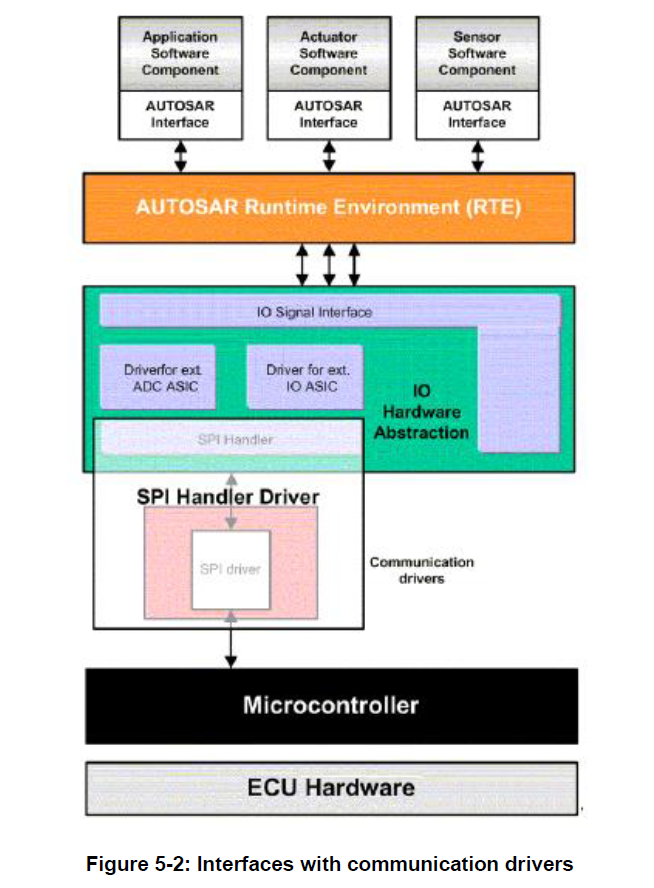
4.2. 与通信驱动程序的接口
如果对板载设备进行管理,I/O硬件抽象实现需为软件组件提供对通信驱动程序的访问(例如:通过SPI通讯)。
下图显示了I/O硬件抽象,其中:
- 接受一些来自SPI处理程序的信号。
- 使用SPI处理程序进行设置。
根据分层软件架构(Layered Software Architecture)[2] (ID03-16),I/O 硬件抽象包含专用驱动程序来管理外部设备,例如:
- 通过SPI连接外部ADC驱动程序。
- 通过SPI连接在ASIC设备上的I/O驱动程序。
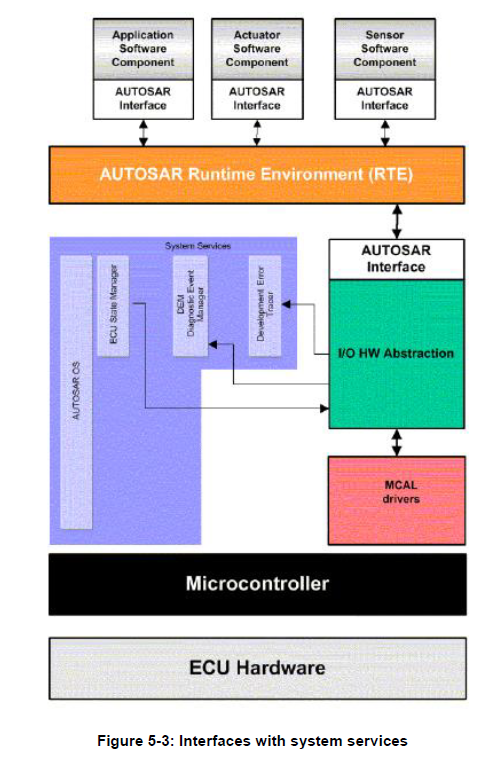
4.3. 与系统服务的接口
I/O硬件抽象模块需与以下系统服务进行交互:
- ECU状态管理器(初始化功能)
- DET:默认错误跟踪器
- BSW调度程序
4.4. 与DCM的接口
I/O硬件抽象模块需提供与DCM的接口,为软件组件提供功能诊断。DCM将使用功能诊断来读取和控制已实现的ECU信号。
提供给DCM的接口原型,应在每个ServiceComponent的头文件IoHwAb_
5. 功能规格
5.1. 集成代码
I/O硬件抽象作为ECU抽象的一部分,被定义为集成代码。
5.1.1. 背景
根据AUTOSAR词汇表[5],集成代码是ECU原理图相关的软件,位于AUTOSAR RTE下方。
5.1.2. 需求说明
集成代码通常意味着该软件是为了适应特定的ECU硬件Layout。所有保护硬件的策略都应包含在此软件包中。
硬件保护意味着,当在某个输出上检测到故障时,I/O硬件抽象模块需切断输出信号。故障包括:接地短路、电源短路、过热、过载等。
I/O硬件抽象模块不需包含故障恢复策略。故障恢复操作应由负责的SWC决定。
I/O硬件抽象的内部行为是项目特定的,所以无法标准化。I/O硬件抽象模块不包含可扩展性。SWC定义需要什么信号已经信号质量,而I/O硬件抽象模块提供相关服务。
5.2. ECU信号概念
5.2.1. 背景介绍
I/O硬件抽象模块并不会为AUTOSAR SW-C提供标准化的AUTOSAR接口,因为它与上层SW-C的接口强烈依赖于信号的采集链。但I/O硬件抽象模块会提供AUTOSAR接口。这些AUTOSAR接口用来表示来自ECU输入的电信号或者定位到ECU输出的电信号的抽象。
同时,这些电信号也可以来自其他ECU或被定位到其他的ECU(例如:通过CAN网络)。
端口(Port)是AUTOSAR组件的入口点。端口由AUTOSAR接口(AUTOSAR interface)来表示。这些接口对应于每个ECU信号。
ECU信号的概念来自于保证硬件平台互换性(interchangeability of hardware platforms)的必要性。
5.2.2. 需求说明
I/O硬件抽象模块处理直接连接到ECU的所有输入和输出,但不包含那些具有专用驱动程序的输入和输出。(如:CAN驱动)。它所包括的所有输入和输出,会直接映射到微控制器端口或一个板载外围设备上。所有微控制器和外围设备之间的通信(但不包括传感器、执行器以及由复杂驱动程序管理的外围设备)都需被I/O硬件抽象模块隐藏,并提供相应的访问接口(interfaces)。
ECU通过网络以及输入和输出引脚连接到系统的其余部分。但网络并不包含在I/O硬件抽象模块的范围内。
一个ECU信号代表一个电信号,这意味着至少代表了一个输入或输出的ECU引脚。
在该层中实现的软件需对ECU引脚进行抽象化。通过使用示波器观测,输入和输出只不过是一个电信号,所以I/O硬件抽象模块定义的所有内容都与电信号的概念有关。对这个概念的一个扩展是诊断(如:电气故障状态)。通过ECU连接器(connectors)诊断并不可见,但I/O硬件抽象模块会提供相关服务。
具有类似行为的电信号可以形成一个类别。 因此通过软件表示的电信号的ECU信号,可能与某个特定于实现的类相关联。
5.3. 属性
尽管每个ECU信号的大部分特性都是由SW-C定义的,但必须为每个信号添加一些属性以实现SW-C期望的信号质量。
为了详细说明信号采集链,需定义了一个属性列表来识别ECU信号的可配置特征。
5.3.1. 过滤/去抖动(Filtering/Debouncing)属性
所有ECU信号都应具有过滤(Filtering)/去抖动(Debounce)的属性。以便于所捕获的原始值(raw value)在传递到上层之前可以被过滤或去抖动。此属性仅对输入信号有效。它会影响信号值采集和访问的具体实现。
5.3.2. Age属性
由I/O硬件抽象模块处理的所有ECU信号都取决于ECU硬件设计。这意味着设置ECU输出信号的时间和获取ECU输入信号的时间,可能每个信号都是不同的。因此为了保证所有类型的ECU信号(输入/输出)的模板行为,定义了一个通用的年龄属性,并且需为每个ECU信号配置它。
所有ECU信号都应具有年龄属性。根据ECU信号的方向(如:输入或者输出),年龄属性有两个特定的名称。但无论如何它总是包含一个最大时间值。
下面的描述解释了该属性对每种ECU信号的含义:
- ECU输入信号:该属性的具体功能是限制信号的寿命。该值定义了此信号数据的最大允许年龄。如果生命周期为0,则必须立即从物理寄存器中检索信号。如果生命周期大于0,则信号在指定时间内有效。
- ECU输出信号:此属性的具体功能是将信号输出限制为最大延迟。该值定义了实际设置此信号之前的最大允许时间。如果延迟为0,则必须立即将信号设置到物理寄存器中。如果延迟大于0,则可以等待配置的时间到达后,才将信号设置到物理寄存器中。
5.4. I/O 硬件抽象和软件组件模板
5.4.1. 背景
本章描述的内容和参考文档[8]相关,当参考文献档的内容有更改时,可能会影响本章描述的内容。
本章总结了如何将I/O硬件抽象模块定义为一个软件组件(SW-C),并简要概述其内部行为。此内部行为描述主要涵盖BSW调度(BSW scheduling)机制。
5.4.2. 概述
I/O硬件抽象模块需基于参考文档[8]中指定的软件组件模板(Software Component Template)。
与任何其他软件组件一样,I/O硬件抽象模块可能是子结构的(sub-structured),具体需取决于ECU的复杂性。
事实上,I/O硬件抽象模块属于一个经典的组件原型(Component Prototype),它可以是原子型的(atomic),也可以时组合型的(composed)。它定义了提供和所需要的接口(interface)。 此外,I/O硬件抽象模块只能通过其PortPrototypes与RTE之上的其他软件组件进行交互。任何使用PortPrototypes表达的隐藏依赖项是不被允许的。
I/O硬件抽象模块,通过标准化接口与MCAL驱动程序相连接,而通过RTE与其他软件组件相连接。 所以I/O硬件抽象模块需使用虚拟端口的概念(Virtual Ports Concept)。
I/O硬件抽象应实现为EcuAbstractionComponentType的一个或多个实例。具体有关EcuAbstractionComponentType的更多信息,可参阅参考文档[8]。EcuAbstractionComponentType的实例化提供了一组端口。在RTE生成期间,仅需考虑与软件组件连接的那些端口。
5.4.3. 端口概念
参考AUTOSAR标准,建议I/O硬件抽象端口需使用软件组件模板来进行定义。因此具体的使用细节可参考软件组件模板文档[8],以了解更多的使用的术语和概念。 同时,I/O硬件抽象的属性(Attribute)定义需通过使用IoHwAbstractionServerAnnotation来进行定义。
5.4.4. 软件组件和可运行概念
软件组件具有实现其策略和内部行为的功能。这些部分使用可运行实体进行描述。前者包含在runnables中,而后者取决于runnables设计。可运行实体由原子软件组件提供,并且(至少间接地)是底层操作系统调度的主题。
原子软件组件的实现必须在其内部行为(InternalBehavior)中为每个Runnable提供代码入口点。有关详细信息,可参阅规范[8]。
可运行实体是最小的代码片段,可以独立激活。它们由原子软件组件提供并由RTE激活。例如:Runnables.被设置为响应服务器上的数据交换或操作调用。可运行实体具有三种可能的状态:Suspended、Enabled 和 Running。在运行时,原子软件组件的每个可运行对象(通过成为OS任务的成员)处于这些状态中的某种状态。
有关定义原子软件组件的每个可运行文件的可用选项和属性,可参阅规范[8]。
5.5. 调度概念
5.5.1. 概述
I/O硬件抽象模块可能会包含几个BSW模块,(例如:板载设备驱动程序)。这些BSW模块中的每一个都可以提供BSW可运行实体,在RTE规范中也称为BswModuleEntity,具体内容可参见参考文档[9]。
为了实现并行运行,BswModuleEntity等效于SWC的可运行实体(runnable entities),在AUTOSAR词汇表 [5] 给出了以下定义:可运行实体是可以执行的原子软件组件的一部分,它可以独立于该原子软件组件的其他可运行实体,被执行及调度。
这意味着I/O硬件抽象可以同时使用Runnable Scheduling和BSW Scheduling。Runnable Scheduling处理Runnable Entities并且是强制性的。与Runnable Scheduling不同,BSW Scheduling是可选的,与BSW调度器的接口必须手动完成。
对于SWC的可运行实体,这些实体会在AUTOSAR OS任务主体中被调用。Runnables在SW-C描述中给出。SW-C的Runnables激活很大程度上取决于RTE的事件。
与SWC经常由RTEEvents激活的方式相同,可调度的BswModuleEntities可以由BswEvents激活。还有一种BswModuleEntity可以在中断的上下文(interrupt context)中被激活。这引出了两个子类别:BswSchedulableEntity和BswInterruptEntity。
5.5.2. Ports提供的接口的操作
I/O硬件抽象模块是通过接口(interface)来进行描述,在SW-C的实现中可对应与PortInterfaces。在可运行实体(Runnable Entities)中实现了SW-C所需的提供端口,包括了服务器端口(Server port)及发送方/接收方端口(Sender/Receiver port)。
I/O硬件抽象的提供端口服务的实现是特定于ECU的,与相应的PortInterface的映射需文档化在软件组件描述中。
5.5.3. Get操作
对于与配置为输入信号的PortInterface关联的ECU信号,I/O硬件抽象应提供GET操作,并且操作的名称(operation short name)可以自由选择。
5.5.4. Set操作
对于与配置为输出信号的PortInterface关联的ECU信号,I/O硬件抽象应提供SET操作,并且操作的名称(operation short name)可以自由选择。
5.5.5. 通知和回调
I/O硬件抽象需定义BswInterruptEntities(与 BswSchedulableEntity 相对的 BswModuleEntity 的子类),以实现通知(notification)或回调(callback)机制,在中断上下文中实现与RTE下层的其他模块进行数据交换。
I/O硬件抽象可能包含一个或多个回调函数。可用的回调函数需要连接到MCAL驱动程序的通知接口。所以这些函数必须尊重MCAL驱动程序的原型定义,即:没有传递参数,也没有返回参数。
实现必须考虑到回调函数将在中断的上下文中执行的情况。回调函数还需支持可以提供触发I/O硬件抽象之外的软件组件的能力。这些通知需要通过RTE的发送方端口(sender port)进行处理。
可用回调函数的数量和执行顺序取决于实现,并且需要文档化在I/O硬件抽象的BSWMD描述中。
通过RTE路由的I/O硬件抽象的回调函数的函数原型需按照以下规则实现:
StdReturnType Rte_Call_<p>_<o>(<parameters>)
回调函数必须与RTE的Rte_Call_<p>_<o>的API兼容,并启用AUTOSAR服务和IO硬件抽象的类型安全配置及实现。
5.5.6. 主函数/作业处理函数
I/O硬件抽象模块可能包含一个或多个作业处理函数,它们是BswSchedulableEntities(与BswInterruptEntity 相对的BswModuleEntity的子类)。例如,每个设备驱动程序对应一个作业处理函数。它们需根据其用途被激活。
这些作业处理函数将由BSW调度程序进行时间触发(time-triggered)。它们可以与其他可运行实体同步执行。BswSchedulableEntities的数量及其执行顺序将取决于实现,并且必须文档化在I/O硬件抽象BSWMD描述中。
5.5.7. 初始化、去初始化和Callout
I/O硬件抽象需定义BswModuleEntries,实现在非中断上下文中与RTE下层的其他软件交换数据,例如:在BSW初始化和去初始化的这些情况。这些BswModuleEntries链接到一个专用的BswModuleEntity,它将被调用以执行服务或者交换数据。
I/O硬件抽象可能包含一个或多个初始化和去初始化函数。例如:每个设备驱动程序定义一个初始化和去初始化函数。与MCAL驱动程序类似,初始化函数应包含一个参数,以便能够将不同的配置传递给设备驱动程序。该函数应将I/O硬件抽象驱动程序使用的所有局部和全局变量初始化为初始状态。
初始化和去初始化函数应由ECU状态管理器专门使用及处理。有关详细信息,可参阅参考文档[10]。
可用函数的数量和执行顺序取决于实现,并且需要文档化在I/O硬件抽象的BSWMD描述中。
5.5.8. 调度示例1 - ADC采样
以下示例展示了ADC转换的调度示例。
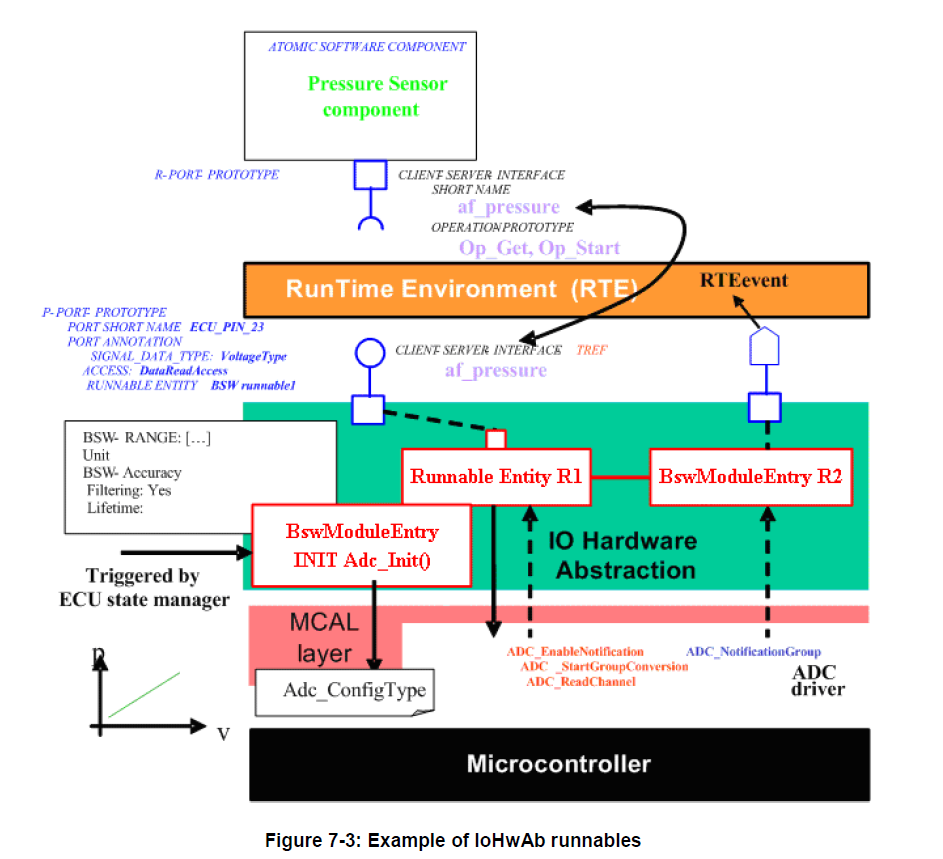
I/O硬件抽象提供了两个P-port。范例中的软件组件接口是af_pressure。
ECU状态管理器能够触发BswModuleEntry来初始化ADC驱动程序,通过使用Adc_ConfigType结构调用Adc_Init函数。
软件组件获取af_pressure值,步骤如下:
- RTE触发专用P-Port 的OP_GET操作。
- R1是一个可运行实体,它允许调用相关的ADC驱动程序服务:
- ADC_EnableNotification
- ADC_StartGroupConversion
- 转换结束时,ADC在中断上下文中触发R2这个BswModuleEntry。因为该接口允许通知,在ADC驱动程序中指定ADC_NotificationGroup调用的callout函数。
- 然后通过RTEevent将通知发送到软件组件。
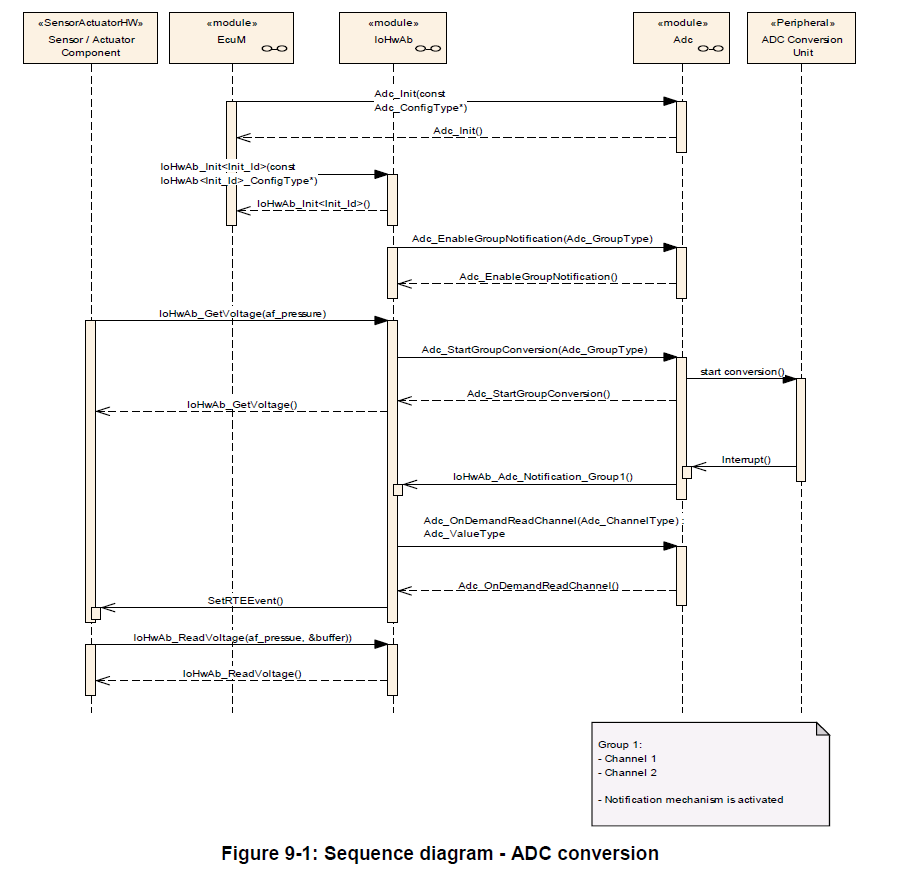
以下是示例的时序图:
5.5.9. 调度示例2 - 同步调度
以下示例展示了用于设置一个连接到SMART电源的灯的调度。
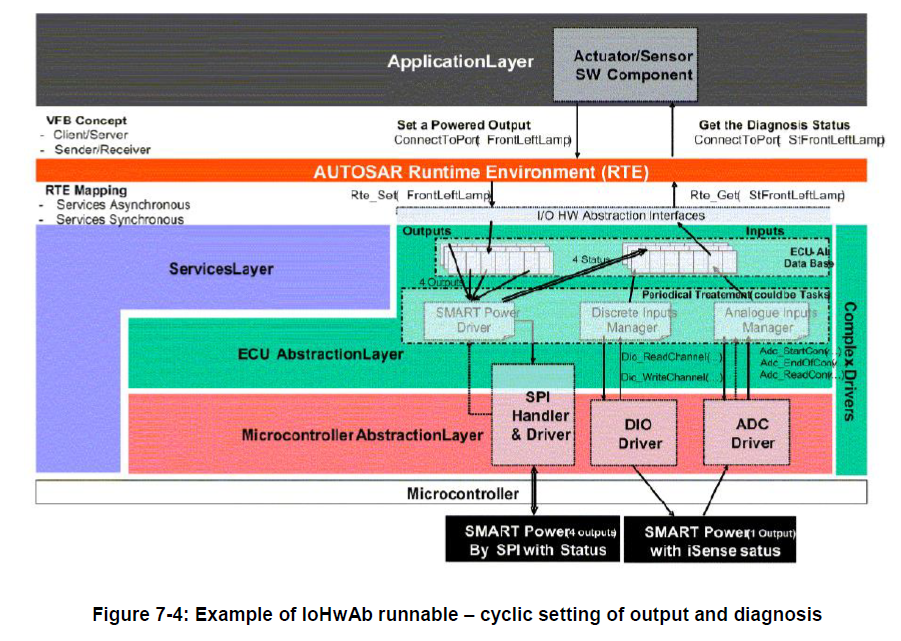
因为SMART电源通过SPI总线连接到微控制器,所以专用代码需使用SPI处理程序。
FrontLeftLamp的设置值通过RTE,保存在I/O硬件抽象模块的缓冲区中。
而另一个SMART电源的输出线,在设置时会同步触发ADC驱动对相同电信号进行ADC转换。在转换结束后,转换结果变成可用,同时通知设置到模拟输入管理器(Analog input manager)将值存储在缓冲区内,以便用于硬件的诊断。
在这个例子中,周期性处理是通过一个BswSchedulableEntity来实现的。
5.6. I/O 硬件抽象层描述
I/O硬件抽象层与软件组件有一些类似,特别是通过端口定义来实现RTE的数据通信的。他们主要区别在于I/O硬件抽象位于RTE之下(在ECU抽象层中),而软件组件位于RTE之上。I/O硬件抽象是基础软件模块和应用软件之间的一种接口。
对于I/O硬件抽象模块,以及其他的服务,当前的方法论需要填写两个不同的模板。例如:为了在AUTOSAR的ECU上集成NVRAM管理器,需使用BSWMD模板记录其对BSW调度程序、操作系统资源等的需求。此外也需要使用SWC模板来描述和RTE相连接的端口信息。
I/O硬件抽象是BSW的一部分。它可以被视为是一组软件模块。虽然IoHwAb是集成代码,但IoHwAb的每个模块都可以适用BSWDT。
同时ECU信号需映射到VFB端口。可以使用软件组件模板(Software Component Template)来描述I/O硬件抽象的实现和应用应用软件组件实现之间的接口定义。
5.6.1. I/O硬件抽象端口定义
I/O硬件抽象规范仅定义了端口使用方法的建议,但端口的实例化应在配置过程中完成,并且会特定于某个ECU的电子设计。
I/O硬件抽象建议为每个可识别的ECU信号创建一个端口,但关联到ECU输出信号的ECU诊断信号除外。 同时ECU信号和端口之间的关系也许也需被定义。
例如: 某个ECU有10个模拟输入引脚(Analog input pins)、15个PWM输出引脚(PWM output pins)、15个数字输出引脚(Digital output pins)。
则I/O硬件抽象为每个ECU信号定义了至少一个端口。在这个简单的例子中,端口被实例化了40次。
5.7. 电源模式
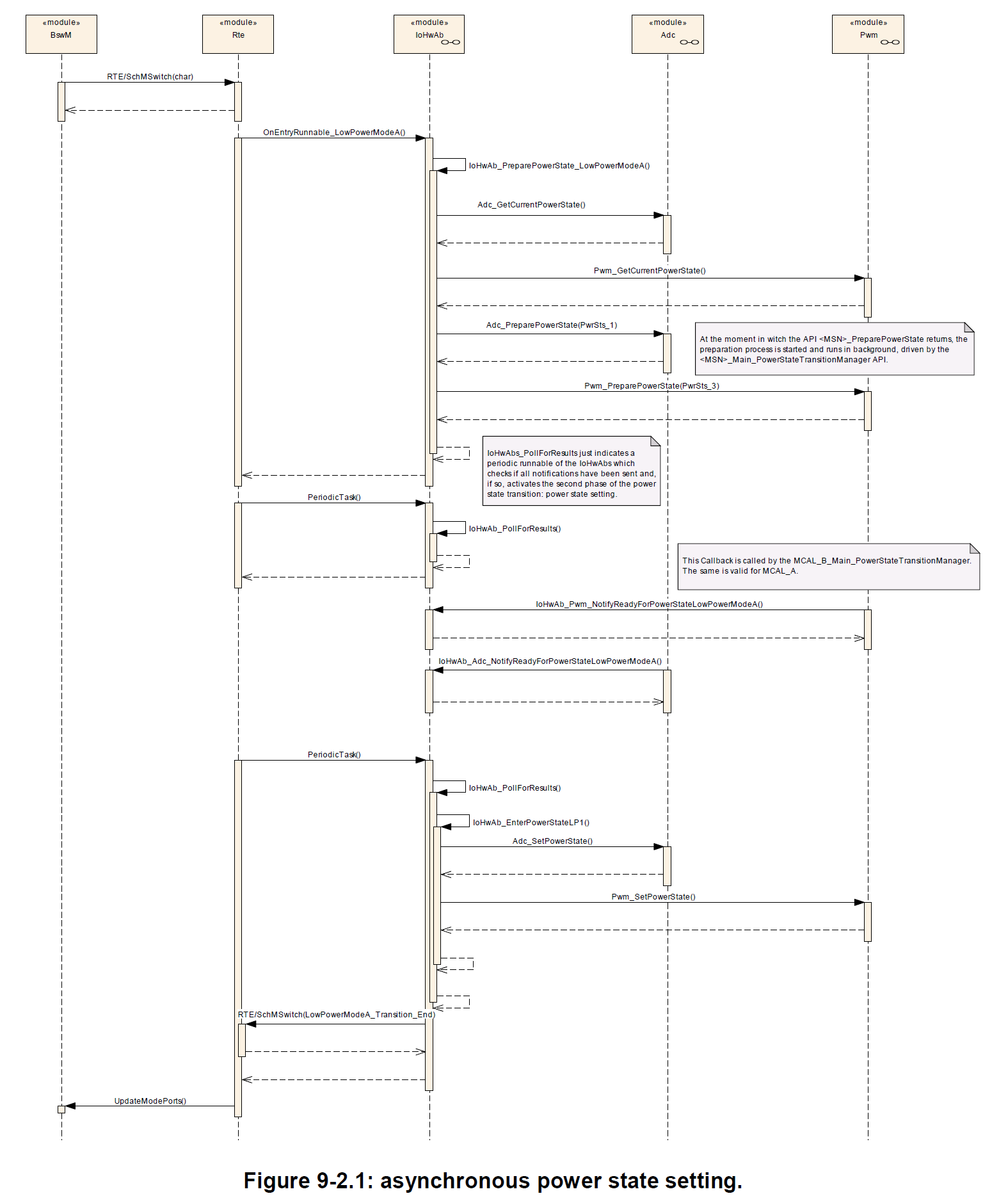
5.7.1. 异步电源状态转换
下图讲述了I/O硬件抽象模块设计的电源状态转换,实现将ADC和PWM设置为低功耗模式的状态。
其中外设配置为异步电源状态转换。在收到准备电源状态的请求后,外围设备的驱动程序向调用者IoHwAbs发出通知,通知它已准备好转换到新的电源状态。
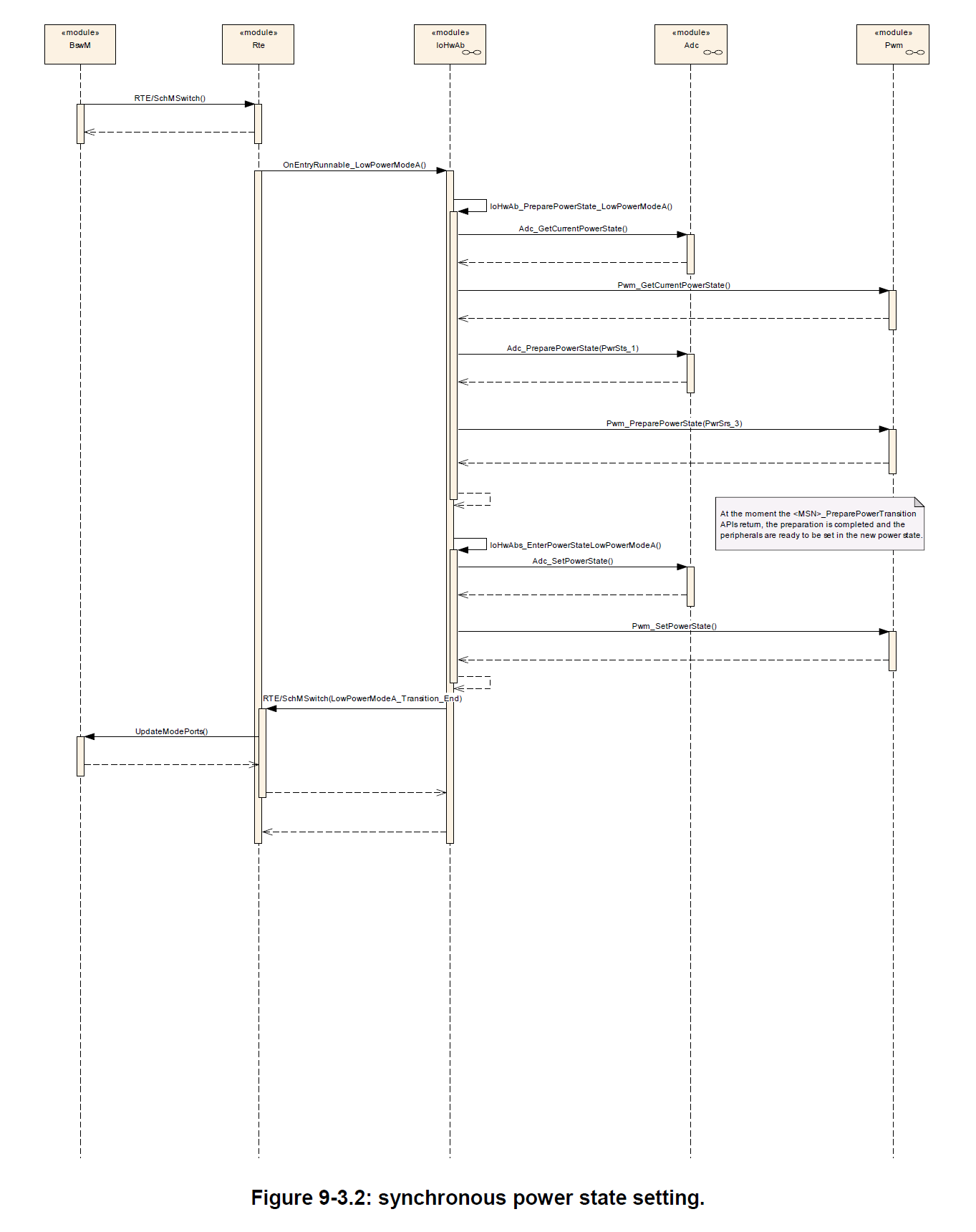
5.7.2. 同步电源状态转换
下图展示了一个同步转换,即:外围设备能够立即完成状态的转换,无需实现一个异步等待的过程。
5.8. 具体示例
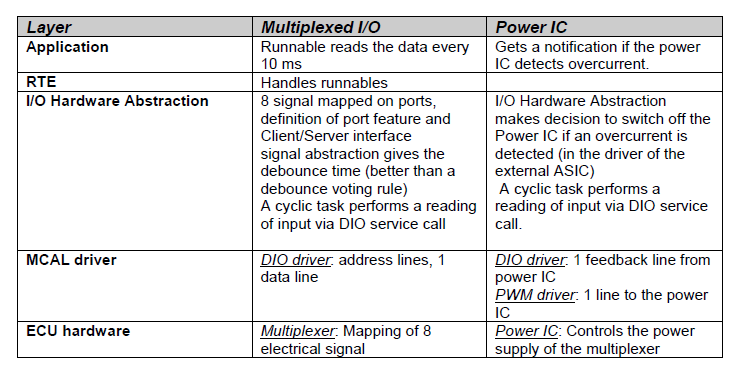
5.8.1. 示例1 - 板载硬件
此示例来自于一个供电的ECU的例子。
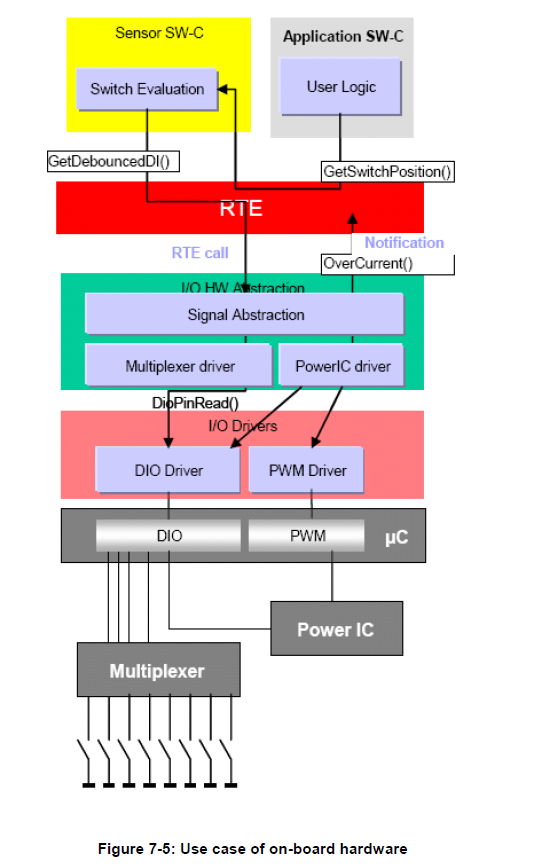
此ECU包含多个数字输入信号(DI):
- 第一组是控制机械开关的慢速数字输入信号
- 第二组是用于诊断功率半导体(Power IC)的快速数字输入信号。这些信号输出电流是否过流(over current)。同时信号也没有从ECU中引出。
由于MCU没有足够的PIN脚,所以慢速的数字输入信号连接到了一个8位多路复用器,每个多路复用器会有3条地址线和1条数据线组成。
OEM客户需求如下:
- 发生过流时到关闭Power IC的最长时间需为1ms
- 开关的反应不得迟于100毫秒
- 每个数字输入信号必须通过5票的3票(3 of 5 voting)来消除抖动。然而实际测试,因为机械开关和Power IC不会产生干扰信号,所以去抖的类型不是非常重要。
当前的解决方案是每0.8毫秒周期任务去读取一次所有数字输入。输入信号包括了慢速的和快速的。慢速数字输入的扫描速率可能可以更低一些,但额外任务的开销高于运行时节省。每次循环中,因为慢速数字输入的去抖是1次,所以最差的去抖值延迟是3.2毫秒。
如果检测到过流,该引脚将会被再次读取几次。但在同一个任务循环中,Power IC需被立即关闭。
应用程序会每10毫秒运行一次,并读取开关的去抖后的数字输入数值和诊断信息的反馈。
AUTOSAR架构上的分解:
5.8.2. 示例2 - 故障监测
在本示例中,首先需定义一个信号用于输出的诊断,它是基于I/O硬件抽象级别的诊断属性来定义。所以一个输入信号会用于执行相关输出诊断的反馈。
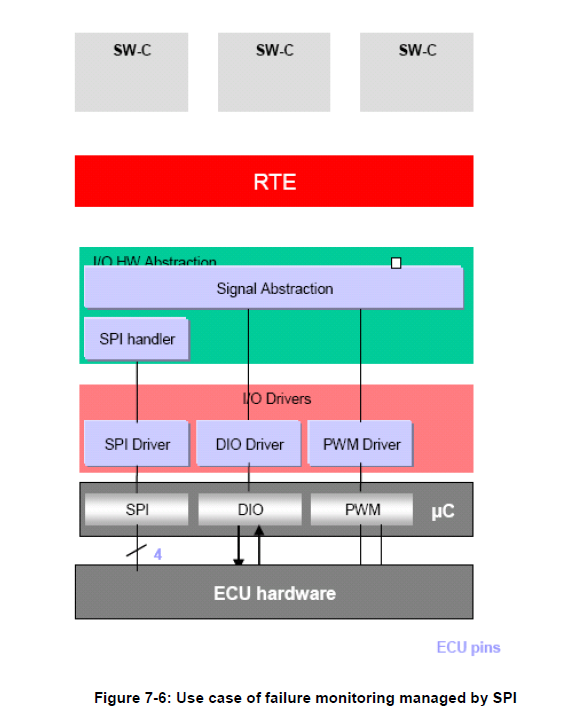
当I/O硬件抽象要求定位一个输出时,并调用Dio_WriteChannel,通道反馈的读取是通过配置为ECU输入引脚完成的。
ICU驱动程序向I/O硬件抽象发送通知。保护策略位于集成代码中。
软件组件可以通过端口定义的诊断操作来获取诊断值。
5.8.3. 示例3 - 输出功率
ECU 硬件有一个功率级ASIC。所有ECU引脚都需在I/O硬件抽象层上作为信号(signal)使用,在RTE层下面。
- 一些输出通过SPI处理程序控制。
- 一些输入通过DIO驱动程序直接控制。
- 一些电压值和频率通过PWM驱动程序设置。
功率级驱动程序(Power Stage Driver)提供了所有输出的视图。它会调用PWM、DIO驱动程序以及SPI处理程序的服务。从软件组件的角度来看,信号抽象使所有这些输出都可见,信号需映射到端口上。同时功率级驱动程序是可配置的。
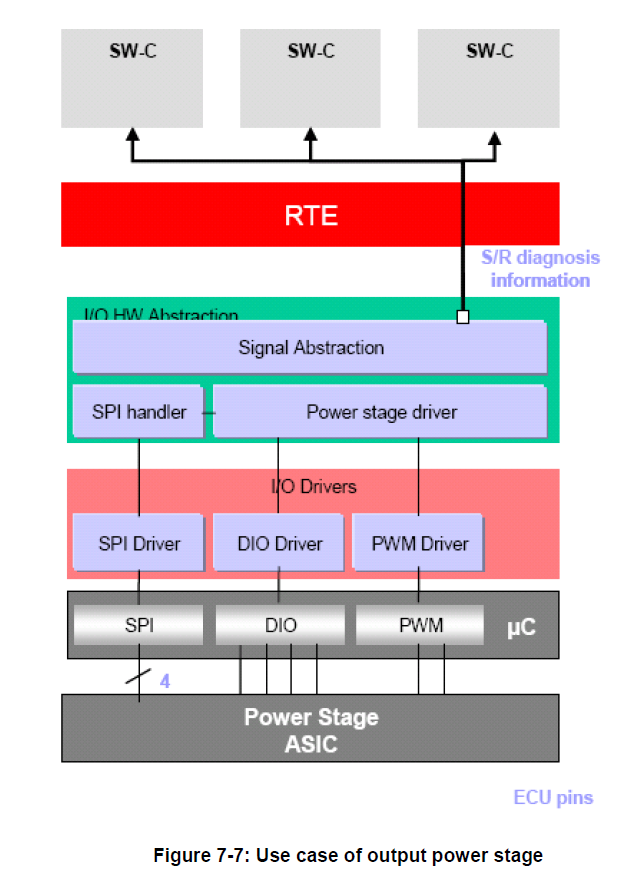
诊断: 每个故障都可以在功率级的级别上检测到。诊断数据流会通过SPI通信,传送到功率级驱动程序。接着通过S/R接口,将诊断结果提供给所有的软件组件。
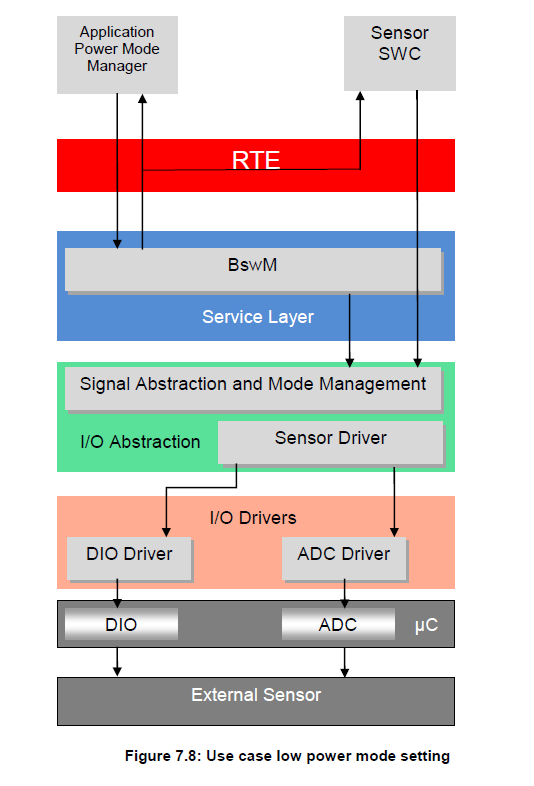
5.8.4. 示例4 - 在低功耗状态下设置传感器和控制外围设备
ECU通过ADC和DIO接口来控制外部的传感器(External Sensor)。在特定情况下,ECU进入传感器关闭且ADC设置为低功耗状态的操作模式。
操作动作顺序如下:
- 应用程序电源模式管理器(Application Power Mode Manager)向BswM发出模式请求,希望能切换到低功耗模式(LowPowerMode)。
- BswM评估请求。如果所有先决条件都满足,则向Power Mode Manager和传感器SWC(Sensor SWC)发出模式切换。
- 传感器SWC停止读取传感数据,即不再向IoHwAb请求任何Get操作。
- IoHwAbs模块从ADC模块注销通知(notification),并最终停止周期性的硬件采集。
- IoHwAbs发送命令让外部传感器硬件进入低功耗模式或将其关闭。
- IoHwAbs调用低功耗模式准备的Callout函数,接着会调用低功耗模式设置Callout函数,并按配置中定义获得与请求的应用低功耗模式(LowPowerMode)相关的 ADC的电源状态。
通过引入更细粒度的模式请求并对确认和开关作出反应,可以逐步控制该过程。
6. API规范
6.1. 函数定义
6.1.1. IoHwAb_Init<Init_Id>
说明: 初始化所有IO硬件抽象软件或者是IO硬件抽象的一部分。
void IoHwAb_Init<Init_Id> (
const IoHwAb{Init_Id}_ConfigType* ConfigPtr )
6.1.2. IoHwAb_GetVersionInfo
说明: 返回此模块的版本信息。
void IoHwAb_GetVersionInfo (
Std_VersionInfoType* versioninfo )
6.1.3. IoHwAb_AdcNotification<#groupID>
说明: 当组 <#groupID> 的组转换完成时将由ADC驱动程序调用。
void IoHwAb_AdcNotification<#groupID> ( void )
6.1.4. IoHwAb_Pwm_Notification<#channel>
说明: 当通道 <#channel> 上出现信号边沿时,将由PWM驱动程序调用。。
void IoHwAb_PwmNotification<#channel> ( void )
6.1.5. IoHwAb_IcuNotification<#channel>
说明: 当通道 <#channel> 上出现信号边沿时,将由ICU驱动程序调用。
void IoHwAb_IcuNotification<#channel> ( void )
6.1.6. IoHwAb_GptNotification<#channel>
说明: 当通道 <#channel> 上的计时器值到期时,将由GPT驱动程序调用。
void void IoHwAb_GptNotification<#channel> ( void )
6.1.7. IoHwAb_OcuNotification<#channel>
说明: 当阈值的当前值与通道<#channel>上的阈值匹配时,将由OCU驱动程序调用。
void IoHwAb_OcuNotification<#channel> ( void )
6.1.8. IoHwAb_Pwm_NotifyReadyForPowerState<#MODE>
说明: 当模式 <#Mode> 的请求电源状态准备完成时,PWM驱动程序将调用API。
void IoHwAb_Pwm_NotifyReadyForPowerState<#Mode> ( void )
6.1.9. IoHwAb_Adc_NotifyReadyForPowerState<#MODE>
说明: 当为模式 <#Mode> 请求的电源状态准备完成时,ADC驱动程序应调用API。
void IoHwAb_Adc_NotifyReadyForPowerState<#Mode> ( void )
6.1.10. IoHwAb_Dcm_<EcuSignalName>
说明: 此函数提供DCM模块对某个ECU信号的控制访问,其中<EcuSignalname>是ECU信号的符号名称。通过此函数可以进行ECU信号锁定(locked)和解锁(unlocked)。锁定代表将ECU信号冻结(freeze)为当前值、配置的默认值或者参数Signal给出的值。
void IoHwAb_Dcm_<EcuSignalName> (
uint8 action, <EcuSignalDataType> signal )
6.1.11. IoHwAb_Dcm_Read<EcuSignalName>
说明: 该函数提供DCM模块对某个ECU信号的读取访问,(其中<EcuSignalname>是ECU信号的符号名称。
void IoHwAb_Dcm_Read<EcuSignalName> (
<EcuSignalDataType>* signal )
6.1.12. IoHwAb_PreparePowerState<#MODE>
说明: 函数需由IoHwAb调用,为转换到给定的电源状态做准备工作。此函数的目的是封装所有操作,以便使硬件为预定义的电源模式做好准备,将应用程序电源定义与硬件电源状态分离。
void IoHwAb_PreparePowerState<#Mode> ( void )
6.1.13. IoHwAb_EnterPowerState<#MODE>
说明: 函数需由IoHwAb调用,以便有效地进入由函数IoHwAb_PreparePowerState<#Mode>准备的电源状态。 此函数的目的是封装所有操作,以便将硬件设置为对应于预定义电源模式的电源状态,从而将应用程序电源定义与硬件电源状态分离。
void IoHwAb_EnterPowerState<#Mode> ( void )
微信扫一扫,获取更多及时资讯
