1. 简介和功能概述
本文档介绍了AUTOSAR基础软件模块BSW模式管理器(BswM)的功能、API 和配置。
BSW模式管理器是实现驻留在BSW中的部分车辆模式管理和应用程序模式管理概念的模块。它的职责是根据简单的规则对来自应用层SW-C或其他BSW模块的模式请求进行仲裁,并根据仲裁结果执行动作。
2. 缩略语
BSW
基础软件(Basic Software)
BswM
基础软件模式管理器(BSW Mode Manager)
BSWMD
基础软件模块说明(Basic Software Module Description)
CDD
复杂驱动程序(Complex Driver)
Dem
诊断事件管理器(Diagnostic Event Manager)
Det
默认错误跟踪器(Default Error Tracer)
ECU
电子控制单元(Electronic Control Unit)
SWC/SW-C
软件组件(Software Component)
SWCD
软件组件说明(Software Component Description)
3. 相关文档
3.1. 输入文件及相关标准和规范
[1] General Specification of Basic Software Modules
AUTOSAR_SWS_BSWGeneral
[2] Guide to Mode Management
AUTOSAR_EXP_ModeManagementGuide
[3] General Requirements on Basic Software Modules
AUTOSAR_SRS_BSWGeneral
[4] Requirements on Mode Management
AUTOSAR_SRS_ModeManagement
[5] Specification of Basic Software Mode Manager
AUTOSAR_SWS_BSWModeManager
[6] Specification of RTE Software
AUTOSAR_SWS_RTE
3.2. 相关规范
因为AUTOSAR提供了基础软件模块的通用规范(参见相关文档[1]),它也适用于BSW模式管理器。所以文档[1]应被视为BSW模式管理器的附加和必需规范。
有关BSW模式管理器的配置和使用的信息可在辅助文档中找到:模式管理指南(Guide to Mode Management)参见相关文档[2]。
4. 约束和假设
4.1. 限制
在一个分区(Partition)内最多可以使用一个BSW模式管理器实例。
4.2. 适用于汽车领域
BSW模式管理器适用于所有汽车域。
5. 对其他模块的依赖
BSW模式管理器具有与AUTOSAR体系结构中的许多BSW模块的接口。然而,这些接口中的大多数都是可选的,并且根据每个ECU的需要使用。
本章中列出的依赖项旨在概述BswM和其他模块之间的一些可能的交互。此处列出的交互和模块不应被视为所有可能性的详尽列表。
5.1. RTE
BswM通过RTE接收来自SW-C的模式请求。模式切换通知也通过RTE传播到SW-C。
5.2. EcuM Flex
EcuM Flex可以向BswM指示其唤醒源的状态。当使用ECU模式处理时,BswM可以设置EcuM Flex的状态,并根据RUN请求协议接收某些模式的状态。
5.3. WdgM
(此节内容已过时)。
WdgM可以通过BswM_WdgM_RequestPartitionReset API向BswM请求分区重置相关操作。WdgM分区重置请求的配置是通过BswMWdgMRequestPartitionReset模式请求源完成的。
5.4. ComM
来自ComM的模式切换指示(Mode Switch Indications)可以通过BswM进一步传播到SW-C。
BswM可以通过ComMUsers向ComM请求通信模式。
5.5. COM
COM中I-PDU组(I-PDU Group)的处理由BswM执行。作为I-PDU组启动/停止的一部分,BswM可以将包含的信号值重置为其相应的初始化值。
同时BswM处理COM中信号截止期限监视(deadline monitoring)的启用和禁用。BswM也可以触发I-PDU的传输。
5.6. PduR
BswM可以启用和禁用PDU Router的I-PDU路由组的路由功能。
5.7. CanSM
来自CanSM的模式切换指示可以通过BswM进一步传播到SW-C。
5.8. LinSM
BswM协调LinSM中LIN调度表(LIN Schedule Tables)的切换,和COM中相应I-PDU组的启动和停止。
来自LinSM的模式切换指示可以通过BswM进一步传播到SW-C。
5.9. LinTP
LIN传输协议(LIN Transport Protocol)作为LinIf一部分的,会向BswM请求模式,以确保在LinTp操作期间,正确的LIN调度表(LIN Schedule Table)处于活动状态。
5.10. FrSM
来自FrSM的模式切换指示可以通过BswM进一步传播到SW-C。
FlexRay单槽模式(Single Slot Mode)的使用,由BswM的请求,FrSM控制。FlexRay软件栈的发送能力可以由BswM通过FrSM调用FrSM_SetEcuPassive API来控制。
5.11. EthSM
来自EthSM的模式切换指示可以通过BswM进一步传播到SW-C。
5.12. DCM
DCM模块会根据所接收到的诊断请求,向BswM执行相应地模式请求。
示例:DCM可以发送禁止正常通信(Disable Normal Communication)请求。在此模式下,BswM将关闭相应的I-PDU组和NM PDU。
5.13. J1939Dcm
J1939Dcm会向BswM报告通信状态变化,以便再进一步把状态传播到SW-C。BswM可以通过J1939Dcm_SetState改变J1939Dcm的状态。
5.14. J1939Nm
J1939Nm可以通过BswM_J1939Nm_StateChangeNotification提供状态指示(state indication)。
5.15. J1939Rm
BswM通过J1939Rm_SetState可以改变J1939Rm的状态。
5.16. NM Interface
BswM将使用Nm_EnableCommunication和Nm_DisableCommunication来控制基于当前模式的NM通信。
示例:在禁用正常通信(Disable Normal Communication)模式下,BswM需要禁止相应网络管理通道上的网络管理通信。
Nm模块可以使用BswM_Nm_CarWakeUpIndication来指示整车被唤醒。
5.17. NvM
NvM模块通过NvM回调函数的集成代码(integration code)向BswM报告NvM数据块的状态。BswM具有NvM在启动和关闭期间,读取和写入所有数据块的操作。
5.18. OS
BswM所需的操作系统功能是需特定于实现的。
5.19. Sd
BswM通过以下得API从Sd模块接收状态指示。
- BswM_Sd_ClientServiceCurrentState
- BswM_Sd_ConsumedEventGroupCurrentState
- BswM_Sd_EventHandlerCurrentState
这些来自Sd的状态指示,可以配置为BswMModeRequestSources。
5.20. File structure
BswM可以使用未在本规范中明确定义的AUTOSAR BSW模块中的接口。
6. 功能规格
BSW模式管理器得基本功能的操作,可以描述为两个不同的任务:
- 模式仲裁(Mode Arbitration)
- 模式控制(Mode Control)
模式仲裁部分对SW-C或其他BSW模块接收到的模式请求和模式指示进行基于规则的仲裁,从而启动模式的切换。
模式控制部分则通过执行包含其他BSW模块的模式切换操作的动作列表,来执行模式切换。
BswM需被视为一个模式管理框架模块,其中行为完全通过相关配置定义。
可能可以通过不同的方式来实现BswM,例如:基于配置生成完整的BswM,或者作为在运行时解析编码配置的规则解释器。但是AUTOSAR的标准并不打算指定BSW模式管理器的任何实现细节。 所以AUTOSAR标准文档中所有描述设计细节的任何示例都应视为解释性文本而不是需求。
6.1. 模式仲裁
BswM执行的模式仲裁简单且基于规则(rule-based)。用于模式仲裁的规则,可以通过BSW模式管理器模块的配置来指定。
因为这些规则由简单的布尔表达式组成,所以模式仲裁对运行时的影响很小。
为了知晓需执行哪些动作列表,BswM模块需要从先前的规则评估的模式仲裁结果检测出变化。此功能的如何完成,以及存储结果所需的内存结构如何,都是特定于实现的,在AUTOSAR标准文档中并不会进行描述定义。
6.1.1. 仲裁规则
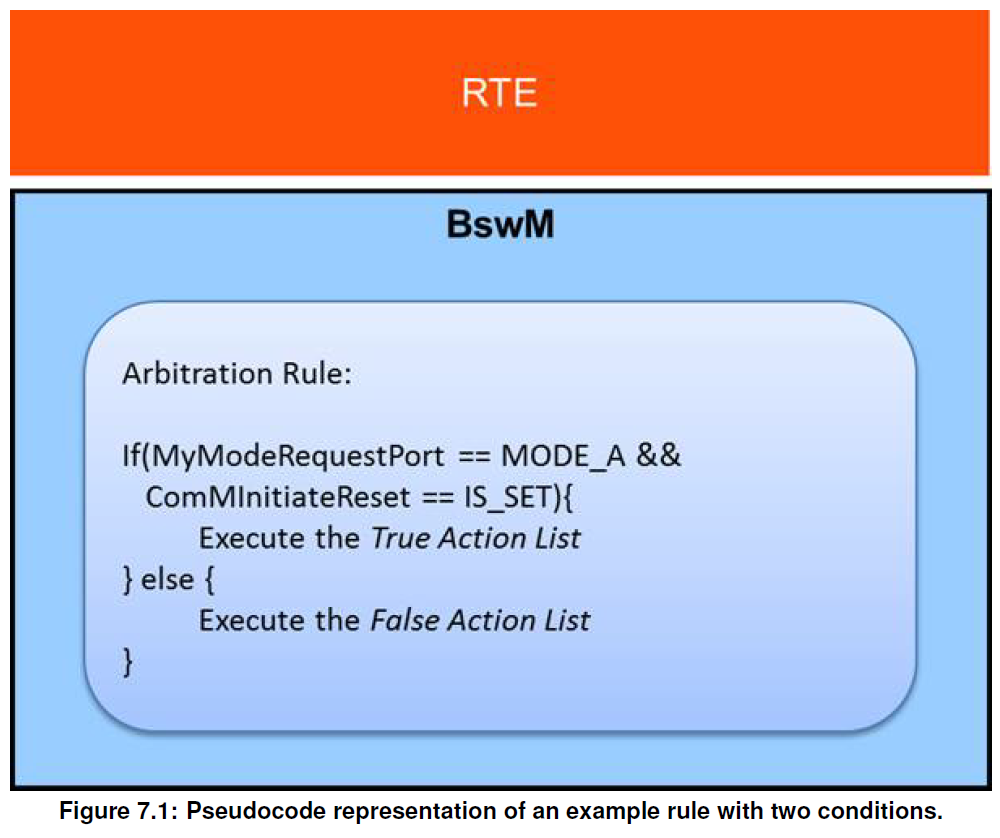
规则是由一组模式请求条件(mode request conditions)组成的逻辑表达式(logical expression)。
规则评估会在以下两个场景进行:
- 当输入模式请求(mode requests)和模式指示(mode indications)改变时
- 在BswM模块主函数的执行时。
评估的结果(真或假)可用于决定相应模式控制动作列表(mode control action list)的执行。
6.1.2. 模式条件和逻辑表达式
构成模式仲裁规则的逻辑表达式可以使用不同的运算符,包括:AND、OR、XOR、NOT和NAND。表达式中的每一项对应一个模式请求条件(mode request condition)。
如果模式条件(mode condition)关联了一个BswMModeRequestPort,则该条件会验证请求的模式(requested mode)或者指示的模式(indicated mode)是否EQUAL或者NOT_EQUAL于某个模式。
如果条件关联了一个BswMEventRequestPort,则条件将验证请求端口是SET还是CLEAR了。
BswMEventRequestPort事件请求与模式请求的不同,在于请求者不向BswM发送请求的模式/值,也就没有模式条件供BswM评估。甚至BswM只能评估事件的接收情况。
当请求者发送/调用事件时,BswMEventRequestPort将处于SET状态。BswM可以稍后通过执行BswMClearEventRequest动作将BswMEventRequestPort置于CLEAR状态。下图展示了具有两个条件的示例规则。规则和可用逻辑操作集被定义为ECU配置的一部分。
当BswMConditionType配置为BSWM_EVENT_IS_SET,且BswMModeCondition引用了BswMEventRequestPort时:
- 如果BswMEventRequestPort处于SET状态,则BswMModeCondition应评估为TRUE。
- 如果BswMEventRequestPort处于CLEAR状态,则BswMModeCondition应评估为FALSE。
当BswMConditionType配置为BSWM_EVENT_IS_CLEARED,且BswMModeCondition引用了BswMEventRequestPort时:
- 如果BswMEventRequestPort处于SET状态,则BswMModeCondition应评估为FALSE。
- 如果BswMEventRequestPort处于CLEAR状态,则BswMModeCondition应评估为TRUE。
当BswM在配置的BswMEventRequestPort上接收到事件时,(例如:BswM_ComM_InitiateReset被ComM调用),BswMEventRequestPort需被置于SET状态。
当在BswMEventRequestPort上执行BswMClearEventRequest动作,则BswMEventRequestPort需被置于CLEAR状态。
6.1.3. 模式仲裁的需求
如上所述,BswM接受模式请求和模式指示作为模式仲裁的输入。模式请求通常来自于应用程序SW-C,但也可能来自于其他BSW模块,例如:DCM。 而模式指示总是由其他BSW模块发出,例如:不同的总线特定状态管理器、EcuM和WdgM。在本文档中,通用术语模式仲裁请求(mode arbitration request)即可对应于模式指示(mode indication),也可对应于模式请求(mode request)。
BswM需根据以下的输入,执行模式仲裁。
- 传入的模式请求(mode requests)
- 输入模式指示(mode indications)
- 传入的模式切换通知(mode switch notification)
- 事件请求(event requests)
- 事件请求的清除(clearing of event requests)
注意:
所有模式仲裁请求(请求和指示)都是由BswM模块以相同的方式处理。它们是通过在BswMModeRequestSource配置容器中,选择相应的模式条件类型(mode condition type)进行配置。
BswM也需支持使用所配置的规则执行模式仲裁。模式仲裁规则(mode arbitration rules)需支持通过模块的配置参数进行配置。
BswM禁止使用先前仲裁规则评估的结果作为逻辑表达式的输入。
注意:
禁止将规则评估的结果用作其他规则评估的输入,主要为zui大程度的满足了现有的BswM配置容器的结构。
作为评估BswM仲裁规则的结果而被调用的动作,只能在动作列表的上下文中被调用。
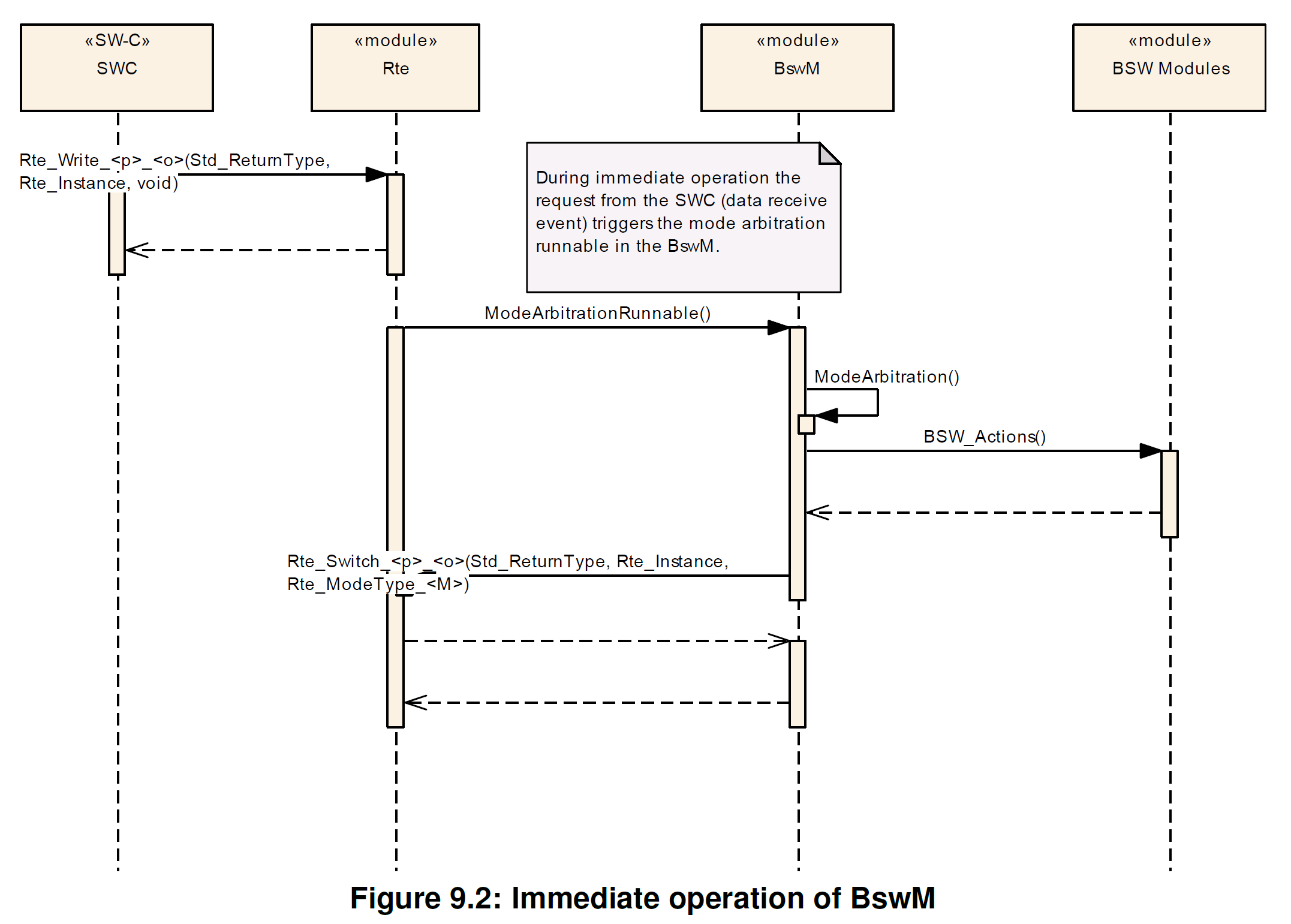
6.1.3.1. 立即和延期操作
执行模式仲裁的处理有两种不同的方式:
- 在模式请求/指示的上下文环境中立即执行,
- 推迟到BswM的周期主函数中执行。
在调用者的上下文环境中执行立即(immediate)请求。系统集成者有责任确保动作列表(action list)的执行不会危及系统性能(performance)或一致性(consistency)。特别是,调用者可能在中断的环境中运行,则有关在中断环境中使用系统函数的限制必须被考虑。
下图展示了立即操作和延迟操作之间的区别。
立即操作:
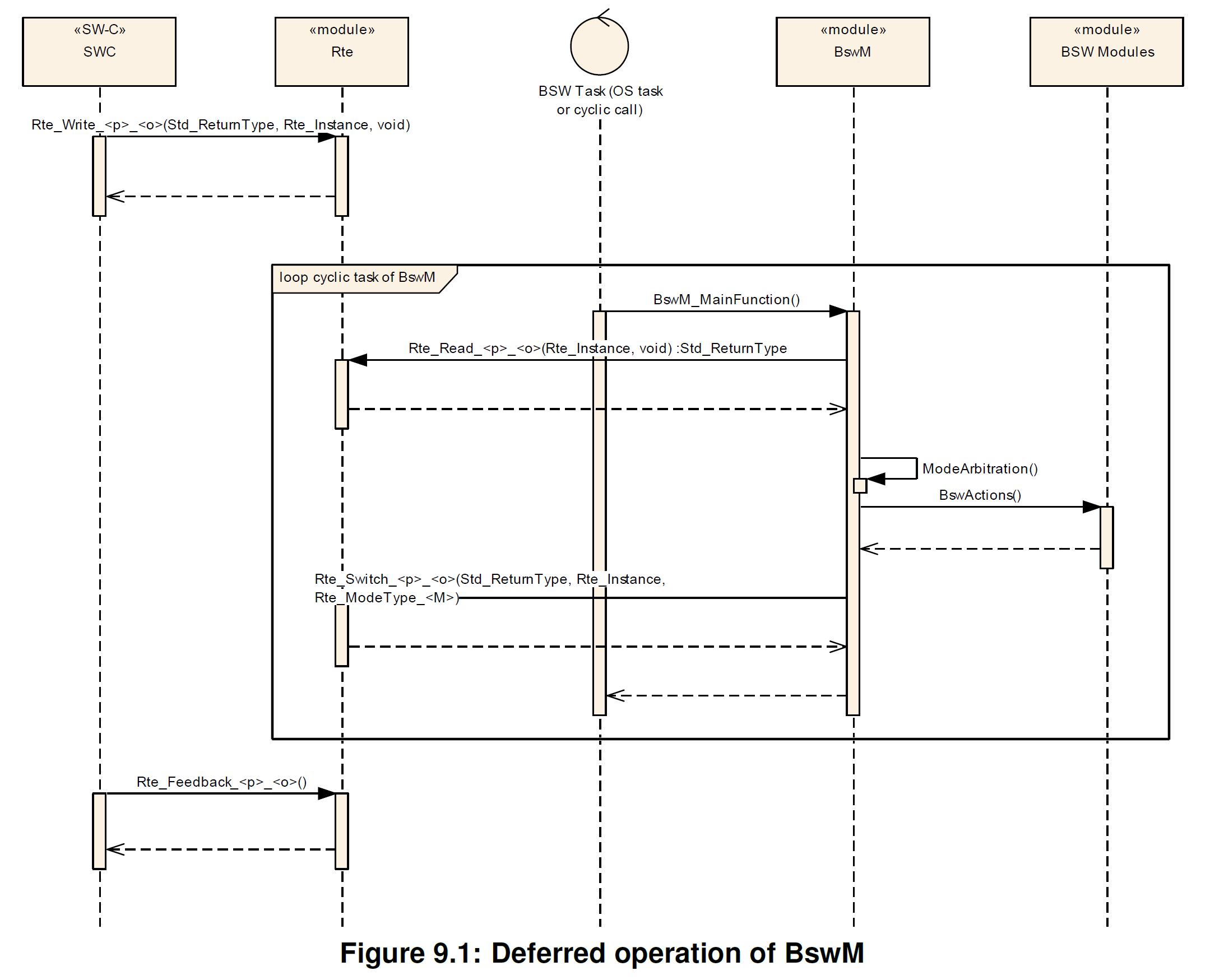
延迟操作:
模式仲裁规则可以包含立即和延迟模式仲裁请求的任意组合。
对于模式仲裁请求(a mode arbitration request),BswM模块可通过BswMModeRequestPort参数容器中的BswMRequestProcessing配置参数进行设定:
- 当BswM模块需支持立即执行模式仲裁时,可将BswMRequestProcessing配置参数设置为BSWM_IMMEDIATE。
- 当BswM模块需支持将模式仲裁推迟到BswM主函数执行时,可将BswMRequestProcessing配置参数设置为BSWM_DEFERRED。
只有使用特定的立即模式条件(immediate mode condition)的模式仲裁规则,才需要由BswM在该特定模式请求或者指示的上下文环境中进行评估。
对于事件的设置(an event is set),BswM模块可通过BswMEventRequestPort参数容器中的BswMEventRequestProcessing配置参数进行设定:
- 当BswM模块需支持立即执行模式仲裁时,可将BswMEventRequestProcessing配置参数设置为BSWM_IMMEDIATE。
- 当BswM模块需支持将模式仲裁推迟到BswM主函数执行时,可将BswMEventRequestProcessing配置参数设置为BSWM_DEFERRED。
使用至少一个延迟模式条件的所有规则,需在每次执行BswM主函数(main function)期间进行评估。
BswM需推迟在其主函数处理期间所收到的模式仲裁请求,直到主函数完成。任何此类推迟的即时请求(IMMEDIATE request)都应在BswM主函数退出之前直接被处理。任何此类推迟的延迟请求(DEFERRED request)请求都应在下一个后续的BswM主函数中被处理。
BswM需推迟在处理IMMEDIATE请求期间收到的模式仲裁请求,直到此请求处理完成。任何此类推迟的即时请求(IMMEDIATE request)应在处理原始即时请求(original IMMEDIATE request)之后直接被处理。任何此类推迟的延迟请求(DEFERRED request)都应在下一个后续的BswM主函数中被处理。
BswM实现可以选择使用保护机制(protection mechanisms),例如:独占区(Exclusive Area),以保证动作的执行或者BswM主函数中的执行不会被任何其他更高优先级的任务中断。
端口更新的术语说明:
任何模式请求端口都有关联的值和状态。更新一个端口意味着改变它的值和状态。
BswM需在仲裁实际发生之前直接更新IMMEDIATE模式请求端口的值,而不是在模式请求端口被触发的时候。而当模式请求端口被触发时,BswM需更新DEFERRED模式请求端口的值。
6.1.4. 初始化后的仲裁行为
BswM初始化后的模式仲裁行为,由配置容器BswMModeInitValue控制。该参数可以为配置中的每个BswMModeRequestPort进行单次的配置。
如果容器BswMModeInitValue不存在或者ModeRequest尚无初始值,则BswM应将相应的模式条件视为未定义,直到相应的模式仲裁请求第一次更新后,才将其用于模式仲裁。
BswM需仅对在其逻辑表达式中不包含任何未定义模式条件的规则进行仲裁。
每个BswMModeRequestPort初始化后的初始值可以由配置容器BswMModeInitValue控制。
在定义BswMModeInitValue的情况下,BswM应在BswM被初始化时,使用BswMBswModeInitValue或者BswMCompuScaleModeValue的值来初始化相应的BswMModeRequestSource。对于单个的BswMModeInitValue,BswM需拒绝同时包含BswMBswModeInitValue和BswMCompuScaleModeValue的配置。该初始化值将用于仲裁规则,直到相应的模式仲裁请求已被更新,例如:每次调用BswM_RequestMode都需更新GenericRequest模式。
注意:
Rte和SchM的模式总是有一个初始值。
在BswM初始化时,所有BswMEventRequestPorts都需被初始化为CLEAR的状态。
6.2. 模式控制
BswM的模式控制部分,会根据模式仲裁的结果执行所有必需的操作。这是通过使用动作列表(Action Lists)来完成的。动作列表是BswM在由模式仲裁触发时,所执行操作的有序列表。
动作列表中的动作(action)可以是以下的三种类型:
- 调用其他BSW模块或者RTE模块。 预定义的动作可参考章节6.2.4-可用操作中所罗列的。
- 链接要包含在执行中的其他动作列表。
- 模式仲裁规则(Mode arbitration rules)。这些规则将在执行相应的动作列表时被评估。通过这种方式就获得了规则的层次结构(a hierarchy of rules)。
因为BswM不需要存储或响应任何BSW模块执行动作的特定返回值,所以BSW中的不同状态管理器(different state managers)将它们的当前状态作为模式仲裁的输入提示给BswM模块。
但是,如果错误(E_NOT_OK)被返回,BswM可以发出DET运行时错误,并可以取消当前执行的动作列表。
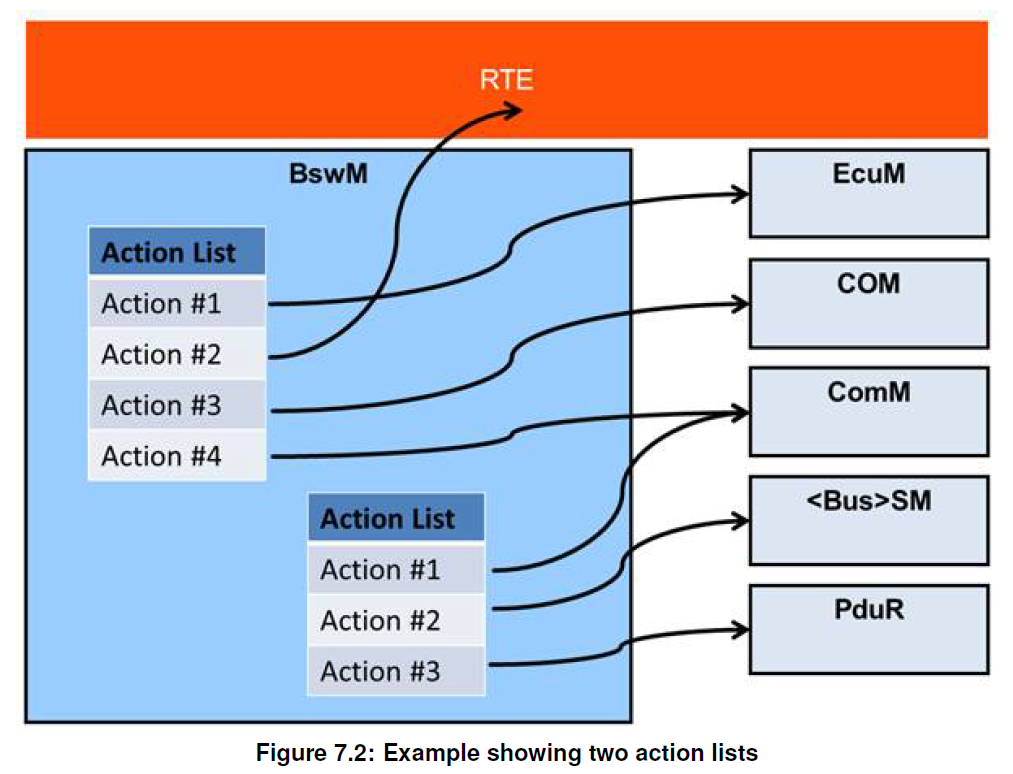
如上图7-2所示,BswM可能包含多个动作列表(Action List),一个动作列表(Action List)可以容纳多个动作(Action)。为了减少动作列表的总数,动作列表应该可以被级联。
动作列表的元素可以是:
- 一个具体动作(a concrete action)
- 一个对另一个动作列表的引用(a reference to another action list)
- 一个模式仲裁需要执行的规则(a rule to be executed by the mode arbitration)。
所以需要有一个标志连接到每个动作列表条目,说明它的类型:动作(action)/ 参考(reference)/ 规则(rule)。包含具体行动的列表与包含引用的列表,或者甚至混合列表的列表,它们的激活方式之间是没有区别。
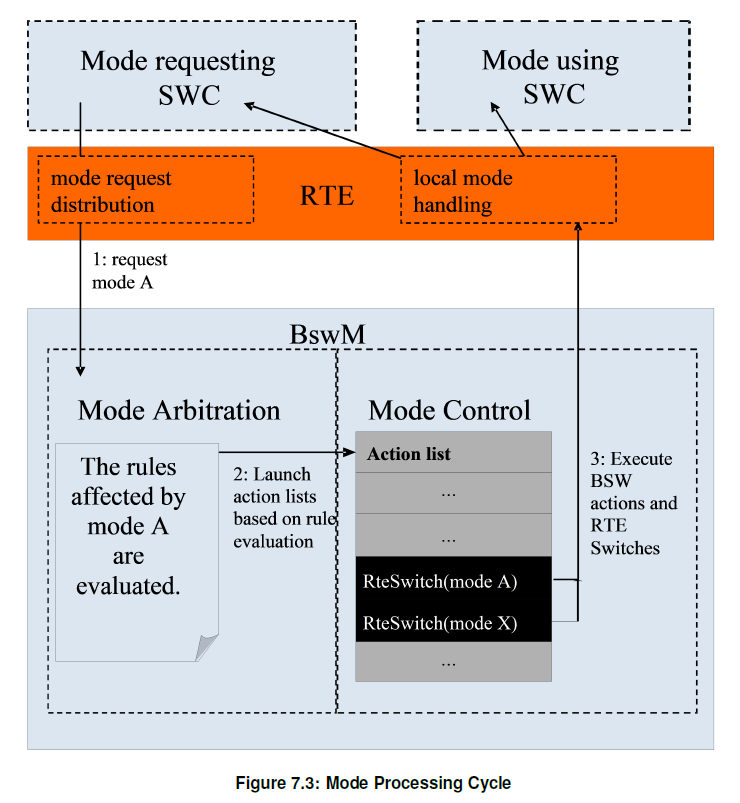
6.2.1. 模式处理循环
下图7-3显示了模式请求的最小处理循环:
- 模式请求者SW-C通过其发送端口(Sender Port)请求模式A。RTE分发请求,BswM通过接收端口接收(Receiver Port)到此请求。
- BswM根据接收到的模式仲裁请求或在执行BswM主函数期间周期地评估这些规则。
- 根据所选择的执行方式,执行相应的动作列表。具体细节可参见章节6.2.3触发和条件动作列表。
- 在执行动作列表时,BswM可以发出一个或多个对RTE Switch API[6]的调用,来通知受影响的SW-C仲裁结果。任何SW-C,尤其是模式请求者都可以注册以接收模式切换指示。
注意:
模式请求者只能从本地BswM接收模式切换指示。对于来自本地代理SW-C发出的其他ECU的请求也同样适用。
6.2.2. 模式控制需求
BswM应通过作为模式仲裁中规则评估结果而执行的动作列表来执行模式控制。
对于模式仲裁的每条规则,BswM应能够根据规则评估为True或者False执行不同的动作列表。
一个动作列表中可以包含一组BswM需顺序执行的动作,也可以包含了指向BswM应执行的其他动作列表的链接。
同时一个动作列表也可以包含指向BswM需在当前动作列表执行范围内所需评估的模式仲裁规则的链接。如果指定的动作列表中包含了模式仲裁规则,则由该评估产生的任何动作列表的执行都应由BswM在继续执行原动作列表之前执行。
如果使用了级联动作列表(cascaded action lists),即包含对其他规则或动作列表的引用,则动作列表结构可以包含多达七个层次级别。
注意:
此限制的目的是使BswM实现和生成工具的测试成为可能。此限制可以由生成工具进行检查。
与在模式仲裁请求上下文环境中评估的规则相关联的动作列表,需在模式仲裁触发时由BswM立即执行,而不是推迟到BswM主函数中执行。这样可以达到必要时对模式请求进行非常短的延迟(short latencies)。
一个顶级规则(top-level rule)是指并不嵌套在动作列表中的规则。一个顶级动作列表(top-level action list)是一种由顶级规则直接执行的动作列表,它不嵌套在另一个动作列表中。
在模式仲裁期间,如果一个顶级动作列表被多个规则触发,这会导致在模式控制期间只有单个触发执行了该动作列表的。它仅适用于顶级动作列表,并不适用于嵌套规则和嵌套动作列表,原因在于它们在父动作列表中的顺序是由用户自定义的。
在模式控制期间,如果要执行多个顶级动作列表,则执行顺序应BswMActionListPriority的设置从高到底。在BswMActionListPriority相同的情况下,执行顺序是任意的。对于不是顶级动作列表的动作列表,需忽略BswMActionListPriority。
如果没有BswMActionListPriority的动作列表应被解释为BswMActionListPriority等于0。
BswM需拒绝BswMActionList包含具有相同值BswMActionListItemIndexes的BswMActionListItems的配置。
在执行BswMActionList时,BswM应从具有最低BswMActionListItemIndex值的BswMActionListItem开始。随后的BswMActionListItems应按其 BswMActionListItemIndex的递增顺序执行。
在动作列表中,配置的BswMActionListItemIndexes不一定需要是连续的或从零开始的。BswM将开始执行具有最低索引的动作列表项,并继续执行具有最高索引的动作列表项。如果索引有间隙,即索引不连续的情况,这些间隙将被简单地忽略。因为动作列表是有序列表,所以不允许在动作列表的上下文中配置相同数值的BswMActionListItemIndexes。
6.2.3. 触发和条件动作列表
基于规则评估,动作列表有两种方式被执行:
- BSWM_CONDITION:条件执行,即每次评估规则时被执行。
- BSWM_TRIGGER:触发执行,即每次评估结果发生变化时才执行。
可以使用BswMActionList配置容器中的BswMActionListExecution配置参数,对动作列表的执行方式的进行设定。
但是对于不被规则直接引用的嵌套动作列表,BswMActionListExecution参数(如:BSWM_CONDITION或者BSWM_TRIGGER)是没有任何意义,并且不会影响嵌套动作列表的执行方式。每当其父动作列表被执行时,不被规则直接引用的嵌套动作列表也会被相应地执行。
如果为触发执行配置了一个True的动作列表,则BswM仅在相应规则的评估从False变为True时才会执行此动作列表。如果为触发执行配置了一个False的动作列表,则BswM仅在相应规则的评估从True变为False时才会执行此动作列表。
如果为条件执行配置了一个True的动作列表,则BswM应在每次将相应规则评估为True时执行此动作列表。如果为条件执行配置了False的动作列表,则BswM应在每次将相应规则评估为False时执行此动作列表。
如果某个动作返回E_NOT_OK,并且相应的BswMAbortOnFail配置参数设置为True,则BswM需中止此动作列表的继续执行。
6.2.4. 可用动作
BswM包含了部分预定义的动作集合,这些动作可以在动作列表中被使用。这样做的原因是为了简化ECU配置和BswM配置代码的生成。
BswM需要能够执行由配置容器BswMAvailableActions定义的预定义动作。同时BswM应能够调用AUTOSAR BSW中的任何函数,即使它不存在BswMAvailableActions配置定义的标准化动作中。
- BswMClearEventRequest
- BswMComMAllowCom
- BswMComMModeLimitation
- BswMComMModeSwitch
- BswMCoreHaltMode
- BswMDeadlineMonitoringControl
- BswMEcuMDriverInitListBswM
- BswMEcuMGoDownHaltPoll
- BswMEcuMSelectShutdownTarget
- BswMEcuMStateSwitch
- BswMEthIfStartAllPorts
- BswMEthIfSwitchPortGroupRequestMode
- BswMFrSMAllSlots
- BswMIdsMBlockState
- BswMJ1939DcmState
- BswMJ1939RmStateSwitch
- BswMLinScheduleSwitch
- BswMNMControl
- BswMPduGroupSwitch
- BswMPduRouterControl
- BswMRteModeRequest
- BswMRteStart
- BswMRteStop
- BswMRteSwitch
- BswMSchMSwitch
- BswMSdClientServiceModeRequest
- BswMSdConsumedEventGroupModeRequest
- BswMSdServerServiceModeRequest
- BswMSdServiceGroupSwitch
- BswMSwitchIPduMode
- BswMTimerControl
- BswMTriggerIPduSend
- BswMUserCallout
BswM也能够调用用户定义的函数(user defined functions),同时用户定义函数的参数及其数值需在ECU配置时定义,通过BswMUserCallout配置容器来定义。
6.2.5. 初始化后模式控制的行为
BswM初始化后,模式控制的行为通过BswMRule配置容器内的BswMRuleInitState配置参数进行配置。它定义了在初始化后第一次评估规则后,决定执行哪个动作列表时,需要使用的先前评估结果(previous evaluation result)。在BswMActionList配置容器内的BswMActionListExecution配置参数也会影响初始化后的动作列表执行。
在初始化后第一次评估规则时,BswM需根据表7-1中的规定进行操作。
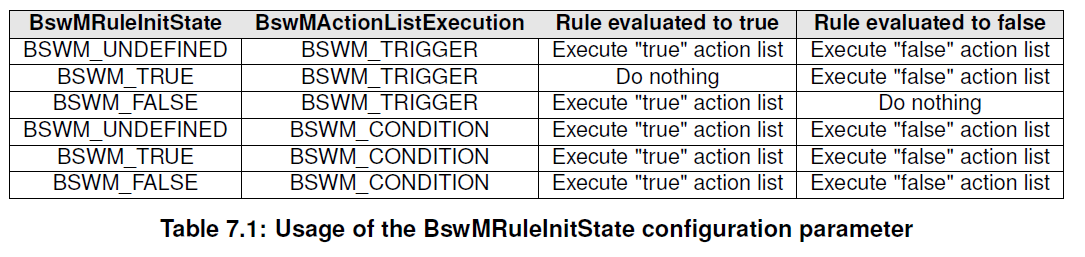
注意:
表格中的true和false的动作列表对于每条规则都是可选的。
6.3. 等待功能
有时需要延迟某个特定的操作(specific actions)或等待进一步的模式控制(mode controls)。出于这个原因,BswM添加了定时器处理(Timer handling)。
一个定时器总是包含两部分构成:
- 一个作为BswMModeRequestSource的BswMTimer。
- 一个控制此BswMTimer的相应动作(可参见BswMTimerControl配置参数)
BswMTimer的数值包括:BSWM_TIMER_STOPPED、BSWM_TIMER_STARTED、BSWM_TIMER_EXPIRED。
定时器的操作只能在BswMTimerControl动作的上下文环境中控制。同时BswMTimer的值可以被BswM中所配置的其他规则进行评估,并以此触发动作列表。外部接口(external interface)是无法来控制或者操作此定时器的。
每个BswMTimer在初始化期间,都是停止状态,也就是说BswMTimer的初始值需为BSWM_TIMER_STOPPED。
BSWM_TIMER_START的BswMTimerAction动作需使用相应配置在BswMTimerValue参数中的定时器值,重新加载引用的BswMTimer(通过:BswMTimerRef),并将定时器的模式更改为BSWM_TIMER_STARTED。
注意:定时器只能通过 BswMTimerAction 动作重新加载(不可能自动重新加载)。
每个BswMTimer处于BSWM_TIMER_STARTED模式时,需在BswM_MainFunction中递减定时器的计数(需按BswM_MainFunction的周期时间)。
注意:
BswMTimer分辨率(resolution)需是BswM_MainFunction周期时间的倍数。此外BswMTimer的准确性取决于BswM_MainFunction的准确性。
如果处于BSWM_TIMER_STARTED模式的BswMTimer时间到期时,则BswMTimer模式需更改为BSWM_TIMER_EXPIRED,接着BswMTimer模式需在同一个BswM_MainFunction的周期中进行仲裁。
BSWM_TIMER_STOP的BswMTimerAction动作需立即停止引用的BswMTimer(通过:BswMTimerRef)并将其模式更改为BSWM_TIMER_STOPPED。
与BswMTimer相关的BswMRequestProcessing(例如:IMMEDIATE、DEFERRED)配置会被BswM忽略。BswM会始终将BswMTimer的处理视为DEFERRED,并在BswM主函数期间进行仲裁。
注意: 在BswM_TIMER_EXPIRED模式下的BswMTimer不会被BswM自动设置为BSWM_TIMER_STOPPED。为了将BswMTimer从BSWM_TIMER_EXPIRED转换到另一种模式,用户需要配置一个动作(Action)。如果没有配置任何动作使BswMTimer退出BSWM_TIMER_EXPIRED模式,那么BswMTimer将在接下来的BswM主函数周期中继续被仲裁为BSWM_TIMER_EXPIRED。
6.4. 多分区支持
对于多个BswM实例的情况,每个BswM实例将根据自己的配置集生成自己单独的服务组件描述。集成商需要将这些单独的服务组件分配给相应的分区。
BswM存在于每个分区中,并具有特定于此分区的配置,即每个分区的BswMConfig都是单独实例的。包含的动作列表只在本地分区执行。
6.5. 错误分类
6.5.1. 运行时错误

当BswMActionListItem配置了BswMReportFailRuntimeErrorId,如果操作返回E_NOT_OK,则BswM需向Det报告BSWM_E_ACTION_FAILED运行时错误。BSWM_E_ACTION_FAILED运行时错误中报告的ErrorId由BswMReportFailRuntimeErrorId中配置的值给出。
6.6. BswM接口和端口
本章节描述了BswM提供的AUTOSAR接口(Interface)和端口(Port)。
请注意,RTE两侧的端口都是需要地:
- BswM服务的SW-C描述将定义RTE下方的端口。
- 每个使用该服务的AUTOSAR的SW-C必须在其自己的SW-C描述中包含它的服务端口。
这些端口需使用相同的接口,并且必须连接到BswM的端口上,以便RTE可以生成适当的ID和所需的符号。
当SW-C向BswM模块请求模式,SW-C需提供了一个发送端口(Sender Port),此端口需定义为一个的特殊SenderReceiverInterface模式请求接口(Mode Request Interface),接口定义必须包含了一个数据元素(data element)。 BswM模块中对应的接收器端口(Receiver Port)在章节6.6.1中描述。数据元素的类型需与对应模式的模式声明组(Mode Declaration Group)中的模式声明(Mode Declarations)类型相同,具有相同的数值。因为数据元素的ImplementationDataType需映射到Mode Declaration Group。
因为SW-C也可能需要知道BswM的仲裁结果,所以请求模式的SW-C也可以是一个模式用户(a mode user)。此类SW-C有一个模式切换端口(Mode Switch Port),模式切换端口被定义为一个模式切换接口(Mode Switch Interface)的R-Port,模式切换接口(Mode Switch Interface)也包含一个数据元素(data element)。这个数据元素的类型就是模式声明组(Mode Declaration Group)本身。
此外其他即使不请求模式但依赖于模式的SW-C也可以包含这样的模式切换端口。有关模式用户接口的详细说明,请参见章节6.6.3 模式切换的通知 。
注意:
如果BSW模式管理器需要知道除了自身决策中请求的模式之外的当前模式,BSW模式管理器也需要一个模式切换的R-Port。
当BSW模式管理器切换相应模式时,RTE会发送模式通知。为此BSW模式管理器有一个模式切换端口的P-Port,SW-C可以连接到该端口。有关模式切换端口的详细说明,请参见章节6.6.2 模式切换端口
在请求SW-C的上下文环境中,定义了模式请求端口(Mode Request Port),包括发送方(Sender)和接收方(Receiver)。Bsw模式管理器的配置会参考了此端口的定义。
举例:一个SW-C定义了一个应用模式AppModeType,一个对应的AppModeRequestType和一个将这两种类型相互映射的AppModeTypeMap的例子
ModeDeclarationGroup AppModeType {
{ APP_MODE_A, APP_MODE_B, APP_MODE_C }
initialMode = APP_MODE_A;
};
ImplementationDataType AppModeRequestType {
lowerLimit = 0;
upperLimit = 2;
};
ModeRequestTypeMap AppModeTypeMap {
modeGroup = AppModeType;
implementationDataType = AppModeRequestType;
};
SW-C定义了下面的两个接口:
- AppModeRequestInterface:SW-C作为发送者,接口为SenderReceiverInterface。
- AppModeInterface:SW-C根据使用场景,可以是P-Ports和R-Ports,接口为Mode Switch Interface:
下图7-4显示了应用程序SW-C的端口如何连接到BSW模式管理器的服务端口。
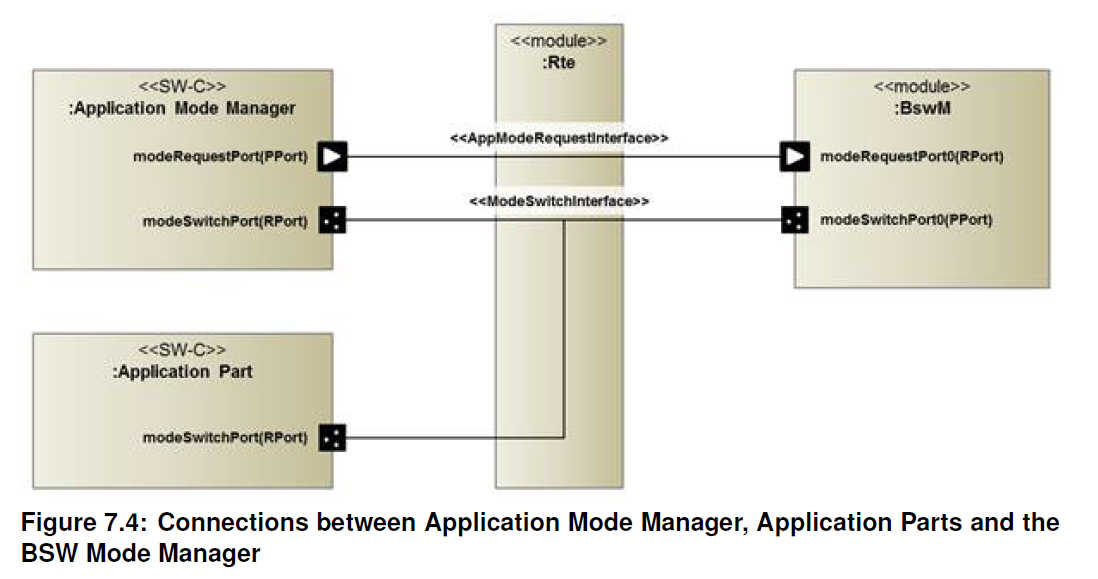
命名为应用程序模式管理器(Application Mode Manager)的SW-C包含了两个端口:
- 一个模式请求端口(Mode Request Port)的P-Port。
- 一个模式切换(Mode Switch)的R-Port。(命名为modeSwitchPort以区别于模式切换P-Port)。
第一个模式请求端口是请求更改应用程序模式,而第二个模式切换端口是在BswM执行模式更改时用来接收通知。应用程序模式管理器的模式请求端口(modeRequestPort)连接到相应的BSW模式管理器的模式请求端口。由于这是正常的发送方/接收方通信(Sender/Receiver communication),所以应用程序模式管理器可以连接到多个BSW模式管理器,即使在远程ECU上也是如此。
为了切换应用模式,Bsw模式管理器有一个模式切换端口(modeSwitchPort_{Name}),通过本地RTE实现。
当RTE执行模式切换时,它会通知所有通过模式切换R-Ports连接到提供端口的连接实体,包括:BSW模块(BSW Modules)或SW-C。以下示例展示了应用程序模式管理器(Application Mode Manager)、其他与模式相关的应用程序部分(Application Part)和BSW模式管理器自身(注意它的名称为modeSwitchPort_{Name},但端口类型为模式切换端口)。所有这些连接也是本地的。
图7-5显示基于SW-C的应用程序模式管理器(在 AUTOSAR R3.1 和更早版本中使用)直接切换应用程序模式,而不向BSW模式管理器请求它。
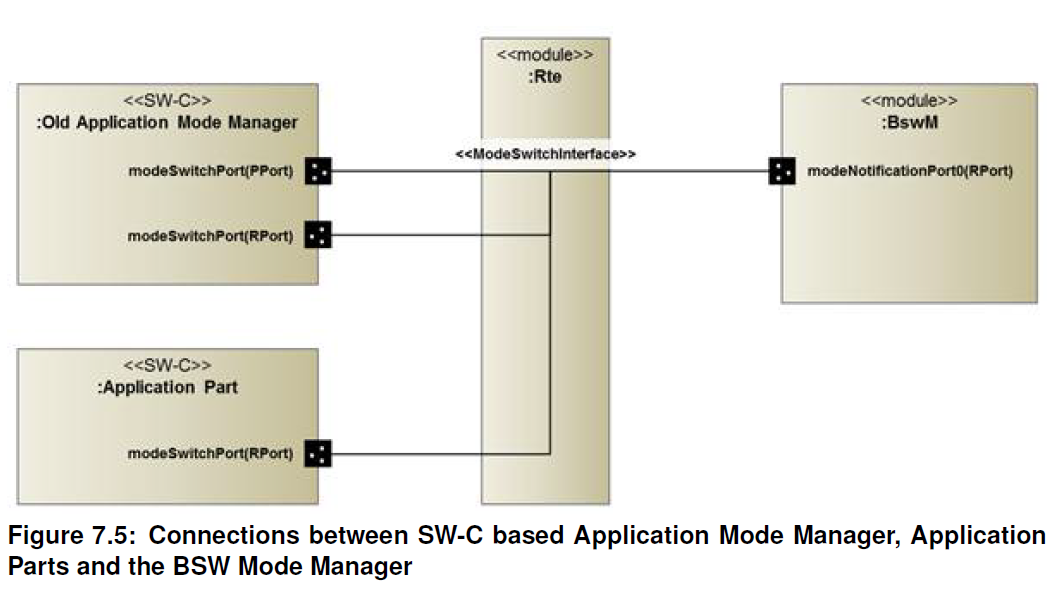
它们直接将模式切换端口连接到本地RTE。这意味着应用程序模式需要在ECU本地,并且BSW模式管理器中的仲裁是不可能的。尽管如此,BSW模式管理器可以使用当前应用模式作为其规则的输入,因为它可以有一个模式切换R-Port(图中名为 modeNotificationPort0)用于该应用模式。
注意:
为了配置BswM,需要了解基于特定ECU需求的模式请求端口和需要及可用的ECU资源。所以BswM的SW-C描述(SW-C description)只能在ECU配置期间才能完成。
从现在开始,以下所有接口定义都被解释为包含在以下的ARPackage中:
ARPackage AUTOSAR_BswM/BswModuleDescription
注意:
本章节介绍的伪代码并不准确,但提供了如何定义相应模型元素的提示。
6.6.1. 模式请求端口
BSW模式管理器必须声明一个接收器端口(Receiver Port),此端口接口定义在SW-C的上下文中定义:
RequirePort AppModeRequestInterface modeRequestPort_{ArbName}_{ReqName};
要读取当前请求的模式,BSW模式管理器实现必须调用:
Rte_Read_modeRequestPort_{ArbName}_{ReqName}_requestedMode(& <variable> );
6.6.2. 模式切换端口
与模式请求一样,BSW模式管理器只引用模式切换对应的SW-C描述中定义的Provide Ports的接口。
对于上面的示例,模式切换的声明如下:
ProvidePort AppModeInterface modeSwitchPort_{ModConName}_{SwitchName};
配置参数BswMModeSwitchInterfaceRef引用此模式切换接口。
要切换当前活动模式,BSW模式管理器实现必须插入以下调用中的某一个调用到其动作列表中:
Rte_Switch_modeSwitchPort_{ModConName}_{SwitchName}_currentMode ( <new_mode> );
SchM_Switch_modeSwitchPort_{ModConName}_{SwitchName}_currentMode( <new_mode> );
6.6.3. 模式切换的通知
除了模式请求之外,当前激活的模式也可以用作模式仲裁的输入。对于应用程序和车辆模式,BSW模式管理器需要注册为模式用户(a mode user)。然后它通过模式切换端口接收有关模式更改的通知。
对于上面的示例,模式通知的声明如下:
注意:
为了更容易区分ModeSwitchPort类型的RequirePort和ProvidePort,以下示例将RequirePort命名为模式通知端口。
RequirePort AppModeInterface modeNotificationPort_{ArbName}_{ModeName};
要读取当前活动模式,BSW模式管理器实现必须调用以下函数中的某一个函数:
Rte_Mode_modeNotificationPort_{ArbName}_{ModeName}_currentMode( &<variable> );
SchM_Mode_modeNotificationPort_{ArbName}_{ModeName}_currentMode( &<variable> );
如果配置了增强型Rte_Mode或SchM_Mode,则BSW模式管理器实现必须调用以下函数中的某一个函数:
Rte_Mode_modeNotificationPort_{ArbName}_{ModeName}_currentMode( &<variable>, &<previousmode>, &<nextmode> );
SchM_Mode_modeNotificationPort_{ArbName}_{ModeName}_currentMode( &<variable>, &<previosmode>, &<nextmode> );
6.6.4. 组件类型和内部行为
BSW模式管理器是一个服务组件(Service Component),它为ECU本地的模式请求提供服务。BSW模式管理器的ServiceComponentType声明了所有上述所有端口和一些内部行为(Internal Behavior)。
ServiceComponentType BswM {
...
InternalBehavior {
...
};
};
内部行为(Internal Behavior)依赖于相关的模式请求端口的参数BswMRequestProcessing。 对于BSWM_DEFERRED,因为BSWM模式管理器在其BswM_MainFunction中循环读取请求,所以RTE不会执行任何特殊操作。相比之下,对于BSWM_IMMEDIATE,因为RTE必须立即触发模式仲裁,所以BSW模式管理器需要注册一个触发模式仲裁的触发函数。对于上面的示例,模式请求的立即处理将需要在BSW模式管理器的内部行为中进行以下声明:
RunnableEntity ModeArbitrationRunnable {
symbol = <mode_arbitration_function>;
canBeInvokedConcurrently = TRUE;
};
DataReceiveEvent AppModeRequestEvent {
port = modeRequestPort0;
dataElement = requestedMode;
startOnEvent = ModeArbitrationRunnable;
};
注意:
如要处理来自其他ECU的模式请求,需要另一种服务组件(service component)。在VFB级别上,它看起来像一个全局服务组件,但实际上它被实例化为驻留在每个ECU的RTE之上的一个服务组件。为了支持这一点,SW-C模板提供了ServiceProxyComponentType而不是普通的ServiceComponentType。
因为模式管理服务代理组件的规范是用户特定的,所以没有在本文档中进行描述。
6.7. 以太网交换机端口组交换
当前版本的SWS BswM支持以太网交换机端口组交换。基于当前请求的PNC,BswM将PNC请求映射到所配置的EthIfSwitchPortGroup并调用EthIf_SwitchPortGroupRequestMode。如果积累的链路状态已更改,则由EthIf模块指示BswM模块。积累的链接状态也可用于通知应用程序。这可用于覆盖 EthIfSwitch端口组的请求和当前积累的链路状态相互矛盾并且需要启动错误处理的错误场景。
AUTOSAR_EXP_ModemanagementGuide文档包含了有关以太网交换机端口组切换的BswM配置指南。
7. API规范
7.1. 函数定义
7.1.1. BswM_BswMPartitionRestarted
说明: 如果包含BswM的分区已经被重新启动,函数则被Restart Task调用。
void BswM_BswMPartitionRestarted (
void
)
7.1.2. BswM_CanSM_CurrentState
说明: 函数被CanSM模块调用,用于指示CanSM当前状态。
void BswM_CanSM_CurrentState (
NetworkHandleType Network,
CanSM_BswMCurrentStateType CurrentState
)
7.1.3. BswM_ComM_CurrentMode
说明: 函数被ComM模块调用,用于指示ComM通道的当前通信模式。
void BswM_ComM_CurrentMode (
NetworkHandleType Network,
ComM_ModeType RequestedMode
)
7.1.4. BswM_ComM_CurrentPNCMode
说明: 函数被ComM模块调用,用于指示PNC的当前模式。
void BswM_ComM_CurrentPNCMode (
PNCHandleType PNC,
ComM_PncModeType CurrentPncMode
)
7.1.5. BswM_ComM_InitiateReset
说明: 函数被ComM模块调用,用于发出关闭信号。
void BswM_ComM_InitiateReset (
void
)
7.1.6. BswM_Dcm_ApplicationUpdated
说明: 函数被DCM模块调用,用于报告更新的应用程序。
void BswM_Dcm_ApplicationUpdated (
void
)
7.1.7. BswM_Dcm_CommunicationMode_CurrentState
说明: 函数被DCM模块调用,用于通知BswM通信模式的当前状态。
void BswM_Dcm_CommunicationMode_CurrentState (
NetworkHandleType Network,
Dcm_CommunicationModeType RequestedMode
)
7.1.8. BswM_Deinit
说明: 去初始化BSW模式管理器。
void BswM_Deinit (
void
)
7.1.9. BswM_EcuM_CurrentState
说明: 函数被EcuM模块调用,用于指示当前的ECU操作模式。
void BswM_EcuM_CurrentState (
EcuM_StateType CurrentState
)
7.1.10. BswM_EcuM_CurrentWakeup
说明: 函数被EcuM模块调用,用于指示唤醒源的当前状态。
void BswM_EcuM_CurrentWakeup (
EcuM_WakeupSourceType source,
EcuM_WakeupStatusType state
)
7.1.11. BswM_EcuM_RequestedState
说明: 函数被EcuM模块调用,用于通知运行请求协议(Run Request Protocol)的当前状态。。
void BswM_EcuM_RequestedState (
EcuM_StateType State,
EcuM_RunStatusType CurrentState
)
7.1.12. BswM_EthIf_PortGroupLinkStateChg
说明: 函数被EthIf模块调用,用于指示某个以太网交换机端口组(Ethernet switch port group)的链路状态变化
void BswM_EthIf_PortGroupLinkStateChg (
EthIf_SwitchPortGroupIdxType PortGroupIdx,
EthTrcv_LinkStateType PortGroupState
)
7.1.13. BswM_EthSM_CurrentState
说明: 函数被EthSM模块调用,用于指示EthSM当前状态。
void BswM_EthSM_CurrentState (
NetworkHandleType Network,
EthSM_NetworkModeStateType CurrentState
)
7.1.14. BswM_FrSM_CurrentState
说明: 函数被FrSM模块调用,用于指示FrSM当前状态。
void BswM_FrSM_CurrentState (
NetworkHandleType Network,
FrSM_BswM_StateType CurrentState
)
7.1.15. BswM_GetVersionInfo
说明: 返回BswM模块的版本信息。
void BswM_GetVersionInfo (
Std_VersionInfoType* VersionInfo
)
7.1.16. BswM_Init
说明: 初始化BSW模式管理器。
void BswM_Init (
const BswM_ConfigType * ConfigPtr
)
7.1.17. BswM_J1939DcmBroadcastStatus
说明: 此API告诉BswM可用网络的所需通信状态。该状态通常通过COM I-PDU Group Switch激活。
void BswM_J1939DcmBroadcastStatus (
uint16 NetworkMask
)
7.1.18. BswM_J1939Nm_StateChangeNotification
说明: J1939Nm状态更改后,通知当前的J1939Nm状态。
void BswM_J1939Nm_StateChangeNotification (
NetworkHandleType Network,
uint8 Node,
Nm_StateType NmState
)
7.1.19. BswM_LinSM_CurrentSchedule
说明: 函数被LinSM模块调用,用于指示特定LIN通道的当前活动调度表。
void BswM_LinSM_CurrentSchedule (
NetworkHandleType Network,
LinIf_SchHandleType CurrentSchedule
)
7.1.20. BswM_LinSM_CurrentState
说明: 函数被LinSM模块调用,用于指示LinSM当前状态。
void BswM_LinSM_CurrentState (
NetworkHandleType Network,
LinSM_ModeType CurrentState
)
7.1.21. BswM_LinTp_RequestMode
说明: 函数被LinTP模块调用,用于请求相应LIN通道的模式。与LinTp_Mode相关的LIN调度表需被使用。
void BswM_LinTp_RequestMode (
NetworkHandleType Network,
LinTp_Mode LinTpRequestedMode
)
7.1.22. BswM_Nm_CarWakeUpIndication
说明: 函数被Nm模块调用,用于指示整车被唤醒。
void BswM_Nm_CarWakeUpIndication (
NetworkHandleType Network
)
7.1.23. BswM_Nm_StateChangeNotification
说明: Nm状态更改后,当前Nm状态的通知。
void BswM_Nm_StateChangeNotification (
NetworkHandleType Network,
Nm_StateType currentState
)
7.1.24. BswM_NvM_CurrentBlockMode
说明: 函数被NvM模块调用,用于指示NvM Block的当前块模式(block mode)。
void BswM_NvM_CurrentBlockMode (
NvM_BlockIdType Block,
NvM_RequestResultType CurrentBlockMode
)
7.1.25. BswM_NvM_CurrentJobMode
说明: 函数被NvM模块调用,用于通知BswM多块作业(multi block job)的当前状态。
void BswM_NvM_CurrentJobMode (
NvM_MultiBlockRequestType MultiBlockRequest,
NvM_RequestResultType CurrentJobMode
)
7.1.26. BswM_RequestMode
说明: 对请求模式(request mode)的通用函数调用(Generic function call)。该功能只能由没有特定模式请求接口的其他的BSW模块使用。
void BswM_RequestMode (
BswM_UserType requesting_user,
BswM_ModeType requested_mode
)
7.1.27. BswM_Sd_ClientServiceCurrentState
说明: 函数被Sd模块调用,用于指示客户端服务的当前状态(可用/关闭)。
void BswM_Sd_ClientServiceCurrentState (
uint16 SdClientServiceHandleId,
Sd_ClientServiceCurrentStateType CurrentClientState
)
7.1.28. BswM_Sd_ConsumedEventGroupCurrentState
说明: 函数被Sd模块调用,用于指示Consumed Eventgroup的当前状态(可用/关闭)。
void BswM_Sd_ConsumedEventGroupCurrentState (
uint16 SdConsumedEventGroupHandleId,
Sd_ConsumedEventGroupCurrentStateType ConsumedEventGroupState
)
7.1.29. BswM_Sd_EventHandlerCurrentState
说明: 函数被Sd模块调用,用于指示EventHandler的当前状态(已请求/已释放)。
void BswM_Sd_EventHandlerCurrentState (
uint16 SdEventHandlerHandleId,
Sd_EventHandlerCurrentStateType EventHandlerStatus
)
7.1.30. BswM_SoAd_SoConModeChg
说明: 函数被SoAd模块调用,用于通知套接字连接的状态变化。
void BswM_SoAd_SoConModeChg (
SoAd_SoConIdType SoConId,
SoAd_SoConModeType State
)
7.1.31. BswM_WdgM_RequestPartitionReset(OBSOLETE)
说明: 函数被WdgM模块调用,用于请求分区重置的函数。
void BswM_WdgM_RequestPartitionReset (
ApplicationType Application
)
7.2. 周期函数
7.2.1. BswM_MainFunction
说明: BswM的主函数。
void BswM_MainFunction (
void
)
微信扫一扫,获取更多及时资讯
