1. 简介和功能概述
ECU管理器模块(ECU Manager)是管理ECU状态的基础软件模块。具体来说,ECU管理器模块负责:
- 初始化和去初始化OS、SchM和BswM以及一些基础软件驱动模块。
- 将ECU配置为SLEEP和SHUTDOWN状态。
- 管理ECU上的所有唤醒事件(wakeup events)。
ECU管理器模块提供唤醒验证协议(Wakeup validation protocol),以区分真实(real)和不稳定(erratic)唤醒事件。
此外,ECU管理模块还负责:
- 提供部分或快速启动(Partial or fast startup)机制。也就是说ECU以有限的功能启动,接着由应用程序确定,并一步步继续完成启动过程。
- 提供交错启动(Interleaved startup)机制。ECU以最低限度地启动,然后启动RTE以实现SW-C能尽快地执行功能。接着ECU继续启动其他的BSW和SW-C,从而将BSW和应用程序功能能够交错运行。
- 分拆RUN状态到多个运行子状态(operational states)。ECU管理模块将一系列SLEEP状态的概念细化为多个RUN状态。从经典的RUN(完全运行)状态到最深的SLEEP(处理器停止)状态,转换为多个连续运行子状态。
- 支持多核ECU:启动、关机、睡眠和唤醒能在ECU的所有内核上进行协调。
灵活的ECU管理采用以下模块提供的通用模式管理工具:
- RTE和BSW调度器模块[2]现在合并为一个模块:该模块支持可自由配置的BSW和应用程序模式及其模式切换工具。
- BSW模式管理器模块[3]:该模块实施可配置的规则和操作列表,以评估切换ECU模式的条件并实施必要的操作。
因此,通过灵活的ECU管理,大多数ECU状态已经不在ECU管理器模块中实现。通常来说,当通用模式管理工具在以下情况下不可用时,ECU管理器模块会接管控制:
- 早期启动阶段(Early STARTUP phases)
- 后期关闭阶段(Late SHUTDOWN phases)
- 设施被调度程序锁定的睡眠阶段。
在ECU管理器模块的UP阶段,BSW模式管理器负责进一步的操作。然而,ECU管理器模块会对来自SW-C的RUN和POST_RUN请求进行仲裁,并通知BswM有关的模式状态。
如果进行了相应的配置,灵活的ECU管理模块可以向后兼容以前的ECU管理模块的版本。有关兼容性配置的更多信息,可参阅模式管理指南(Guide to Mode Management)[4]。
2. 定义和缩写
2.1. 定义
Callout
Callout是指系统设计人员使用代码替换的一种Stub函数。通常在配置时,为ECU管理器模块提供一些附件功能。Callout分为两类。一类是作为硬件抽象层向ECU管理器模块提供强制性的功能或服务。另一个类是提供一些可选功能。
Mode
模式(Mode)是指在车辆中运行过程中各种状态机的某组特定的状态。它不只和ECU管理器模块相关。同时并与特定实体、应用程序或整个车辆相关。
Passive Wakeup
被动唤醒(Passive Wakeup)是指由连接的总线(Attached bus)引起的一种唤醒。它不属于由定时器或传感器活动等内部事件引起的唤醒。
Phase
阶段(Phase)是指和ECU管理器的动作及事件相关的逻辑或时间组合,例如:STARTUP、UP、SHUTDOWN、SLEEP等。阶段可以由通常称为序列的子阶段组成。
Shutdown Target
ECU必须在进入睡眠状态、关闭电源或复位之前被关闭。 因此SLEEP、OFF和RESET是有效的关机目标(Shutdown Target)。通过选择关机目标,应用程序可以在下次关闭后,将其对ECU行为的愿望传达给ECU管理器模块。
State
状态(State)存在于它们各自的BSW组件内部,对应用程序是不可见。所以它们只被BSW的内部状态机使用。ECU管理器模块的状态,负责构建阶段(Phase)并处理相关模式(Mode)。
Wakeup Event
唤醒事件(Wakeup Event)是指导致唤醒的物理事件。例如:CAN消息或IO输入的跳变都可以是唤醒事件。
Wakeup Reason
唤醒原因(Wakeup Reason)是指作为上次唤醒的实际原因的唤醒事件。
Wakeup Source
处理唤醒事件的外围设备或ECU组件称为唤醒源(Wakeup Source)。
2.2. 缩写
BswM
基础软件模式管理器(Basic Software Mode Manager)
Dem
Diagnostic Event Manager
Det
Default Error Tracer
EcuM
ECU Manager
Gpt
General Purpose Timer
Icu
Input Capture Unit
ISR
Interrupt Service Routine
Mcu
Microcontroller Unit
NVRAM
Non-volatile random access memory
Os
Operating System
Rte
Runtime Environment
VFB
Virtual Function Bus
3. 相关文档
3.1. 输入文件
[1] List of Basic Software Modules
AUTOSAR_TR_BSWModuleList
[2] Specification of RTE Software
AUTOSAR_SWS_RTE
[3] Specification of Basic Software Mode Manager
AUTOSAR_SWS_BSWModeManager
[4] Guide to Mode Management
AUTOSAR_EXP_ModeManagementGuide
[5] Glossary
AUTOSAR_TR_Glossary
[6] General Specification of Basic Software Modules
AUTOSAR_SWS_BSWGeneral
[7] Virtual Functional Bus
AUTOSAR_EXP_VFB
[8] General Requirements on Basic Software Modules
AUTOSAR_SRS_BSWGeneral
[9] Requirements on Mode Management
AUTOSAR_SRS_ModeManagement
[10] Specification of ECU State Manager
AUTOSAR_SWS_ECUStateManager
[11] Specification of MCU Driver
AUTOSAR_SWS_MCUDriver
[12] Specification of CAN Transceiver Driver
AUTOSAR_SWS_CANTransceiverDriver
4. 约束和假设
4.1. 限制
ECU不能总是关闭,即:零功耗(zero power consumption)。 理由:关机目标OFF只能通过ECU特殊硬件来达到。例如:电源保持电路(a power hold circuit)。如果此硬件不存在,则AUTOSAR规范建议改为发出复位(reset)指令。 但是其他默认行为被允许的。
5. 对其他模块的依赖
以下部分概述了与其他模块的重要关系。它们还包含这些模块必须满足的一些要求才能与ECU管理器模块正确协作。如果将数据指针传递给BSW模块,则地址需要指向内存空间共享部分中的位置。
5.1. SPAL 模块
5.1.1. MCU 驱动
MCU驱动是ECU管理器模块初始化的第一个基础软件模块。 但是当MCU_Init返回时,MCU模块和MCU驱动程序模块不一定已经完全初始化,可能需要额外的MCU模块特定步骤来完成初始化。ECU管理器模块提供了两个Callout,可以放置相关附加代码。有关详细信息,可参阅StartPreOS序列中的活动。
5.1.2. 驱动程序依赖和初始化顺序
BSW驱动程序可能相互依赖。一个典型的例子是看门狗驱动,它需要SPI驱动来访问外部看门狗。这意味着一方面,驱动程序可能是堆叠的,与ECU管理器模块无关。另一方面,一些被调用模块必须在调用模块的初始化之前已被初始化。
系统设计者需负责在配置时,在EcuMDriverInitListZero、EcuMDriverInitListOne、EcuMDriverRestartList和EcuMDriverInitListBswM中定义初始化顺序。
5.2. 具有唤醒功能的外设
唤醒源必须由驱动程序处理和封装。
这些驱动程序必须遵循AUTOSAR ECU管理器模块中提出的协议和要求,以确保无缝集成到AUTOSAR的基础软件中。
基本上协议如下:
驱动程序必须调用EcuM_SetWakeupEvent来通知ECU管理器模块,已检测到待定的唤醒事件。驱动程序不仅需要在ECU在睡眠阶段,等待唤醒事件时调用EcuM_SetWakeupEvent,同时在驱动程序初始化阶段以及EcuM_MainFunction运行的正常操作期间,也是同样需要调用EcuM_SetWakeupEvent。
驱动程序必须提供一个显式函数来使唤醒源进入睡眠状态。此功能应将唤醒源置于节能(energy saving),进入惰性操作模式,并重新启用唤醒通知机制。
如果唤醒源能够产生虚假事件,则以下模块必须为唤醒事件提供验证调用,或者调用ECU管理器模块的验证函数。
- 驱动程序
- 使用驱动程序的软件堆栈
- 另一个合适的 BSW 模块
如果不需要验证,则此需求不适用于相应的唤醒源。
5.3. 操作系统
ECU管理器模块负责启动和关闭AUTOSAR操作系统。ECU管理器模块会定义了在操作系统启动之前如何处理控制以及在操作系统关闭之后如何处理控制的协议。
5.4. BSW 调度程序
ECU管理器模块负责初始化BSW调度程序。同时ECU管理器模块会提供EcuM_MainFunction,此接口函数会被定期调度,用于评估唤醒请求并且更新闹钟。
5.5. BSW 模式管理器
ECU状态通过AUTOSAR模式来实现,BSW模式管理器负责监控ECU中的变化,并酌情影响ECU状态机的相应变化。
- 有关AUTOSAR模式管理的讨论,请参阅虚拟功能总线规范(Specification of the Virtual Function Bus)[7],
- 有关ECU状态机实现细节的指南,以及如何通过配置BSW模式管理器以实现ECU的状态机,请参阅模式管理指南(Guide to Mode Management)[4],
BSW模式管理器只能在模式管理运行后才能管理ECU的状态机。也就是说,在SchM被初始化之后,直到SchM被去初始化或者停止。ECU管理器模块会在 BSW模式管理器不工作后接管ECU的控制。
ECU管理器模块在ECU启动后立刻进行控制,并在初始化SchM和BswM后将控制权委托给BSW模式管理器。
BswM会将ECU的控制权交还给ECU管理器模块,以达到锁定操作系统并处理唤醒事件。
BswM也会在操作系统关闭停止前,将控制权立刻交还给ECU管理器。
在验证唤醒源时,ECU管理器模块通过模式切换请求向BswM指示唤醒源状态更改。
5.6. 软件组件
ECU 管理器模块需处理以下ECU范围的属性:
- 关机目标(Shutdown targets)。
在AUTOSAR规范中,假定SW-C通过AUTOSAR的端口来设置这些关机目标的属性,通常通过SW-C的某些ECU的特定部件。ECU管理器不会阻止SW-C覆盖SW-C所做的设置。这些策略必须在更高级别来定义。
以下措施可能有助于解决此问题:
- SW-C模板可能会包含某个字段来表示SW-C是否设置关机目标。
- 生成工具可能只允许有一个SW-C访问关机目标的配置。
6. 功能规格
新的AUTOSAR标准中已经引入了新的、更灵活的ECU状态管理方法。然而,这种灵活性(flexibility)是以责任(responsibility)为代价的。所以并没有标准的ECU模式或状态。ECU的集成商必须决定需要哪些状态并对其进行配置。
当使用ECU模式处理时,标准状态RUN和POST_RUN由RUN请求协议(RUN Request Protocol)经仲裁后,传播到BswM模块。系统设计人员在通过BswM actions设置EcuM模式时,必须确保各个状态的先决条件已被满足。请注意BSW和SW-C都不能依赖某些ECU模式或者状态,尽管以前版本的BSW在很大程度上不依赖它们。
本文档仅指定保留在ECU管理器模块中的功能。有关ECU状态管理的完整图片,可参阅其他相关模块的规范,如:RTE和BSW调度器模块[2]和BSW模式管理器模块[3]。有关ECU状态和相关BSW模块之间交互的一些示例用例,可参阅模式管理指南[4]。
ECU管理器模块采用与过去相同的方式来管理唤醒源(wakeup sources)的状态。 设置/清除/验证唤醒事件的API接口保持不变,但显着区别是这些API采用回调的方式。
唤醒源处理不仅发生在唤醒期间,而且持续地与所有其他EcuM活动并行进行。这个功能现在通过模式请求(mode requests)与ECU管理的其余部分完全解耦。
6.1. ECU管理模块的阶段
以前版本的ECU管理模块规范已经区分了ECU状态和ECU模式。
ECU模式是一种持续时间较长的操作ECU活动,这些活动对应用程序可见并为它们提供方向,例如:启动(starting up)、关闭(shutting down)、休眠(going to sleep)和唤醒(waking up)。
ECU管理器状态通常是ECU管理器模块操作的连续序列,通过等待直到外部条件满足而终止。例如:Startup1包含操作系统启动之前的所有BSW初始化,并在操作系统将控制权返回给ECU管理器模块时终止。
对于当前的灵活的ECU管理器(Flexible ECU Manager),状态、模式和阶段的定义可参考定义和首字母缩略词(Definitions and Acronyms)章节中。
在这里ECU状态机在BSW模式管理器模块的控制下作为通用模式实现。这就产生了一个术语问题。因为旧的ECU状态(State)现在变成了通过RTE_Mode端口接口可见的模式(Mode),而旧的ECU模式(Mode)变成了阶段(Phase)。由于通过VFB定义并在RTE中使用的模式(Mode)仅在UP阶段可用,即ECU管理器处于被动状态,所以有必要将术语从模式(Mode)更改为阶段(Phase)。
图 7.1 显示了灵活的ECU管理器模块各阶段的概览。
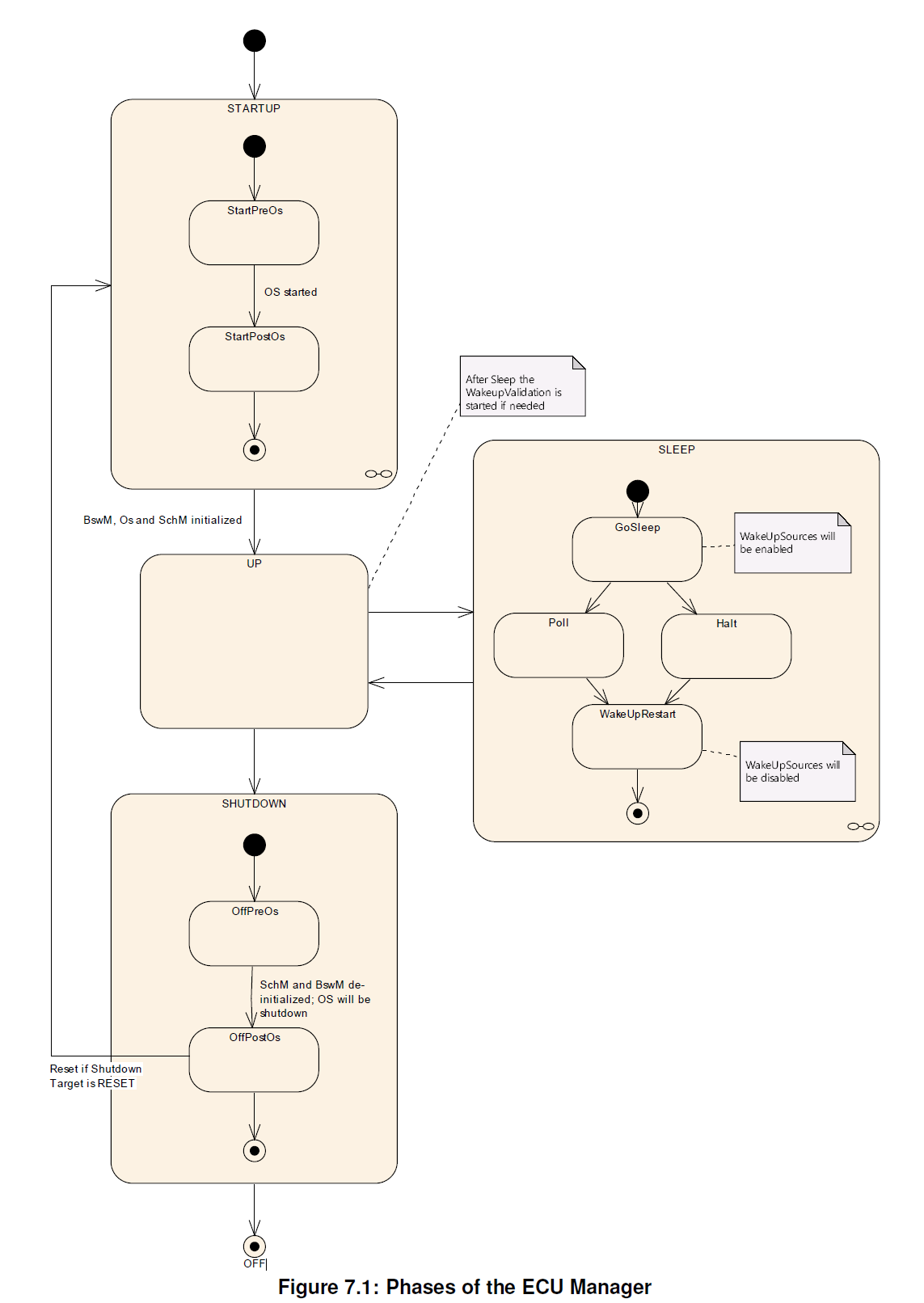
STARTUP阶段一直需持续到模式管理设施(Mode Management Facilities)正常运行。基本上STARTUP阶段包括启动模式管理所需的最少活动:初始化低级驱动程序、启动操作系统和初始化BSW调度程序和BSW模式管理器模块。类似地SHUTDOWN阶段与STARTUP阶段相反,是模式管理被去初始化(de-initialized)的阶段。
UP阶段由所有未突出显示的状态组成。在该阶段ECU按照integrator定义的状态机要求,从一个状态转换到另一个状态,从一个模式转换到另一个模式。
在使用ECU模式处理(ECU Mode Handling)的情况下,UP阶段包含默认模式。这些模式之间的转换是通过ECU状态管理器模块和BSW模式管理器模块之间的合作完成的。
注意: UP阶段包含一些以前的睡眠状态。从OS调度程序被锁定以防止其他任务在睡眠中运行的点,到使ECU进入睡眠状态的MCU模式已经退出的点。此时,模式管理设施不运行,ECU 管理器模块提供了唤醒处理的支持。
6.1.1. STARTUP阶段
STARTUP阶段的目的是将基础软件模块初始化到通用模式管理设施(Generic Mode Management facilities)可操作的点。 有关初始化的更多详细信息,可参见第6.3章。
6.1.2. UP阶段
本质上,UP阶段开始于BSW调度程序启动并调用了BswM_Init函数。此时内存管理(memory management)尚未初始化,没有通信堆栈(communication stacks),没有 SW-C 支持(RTE)并且SW-C尚未启动。处理以特定的模式启动(在STARTUP之后配置的下一个模式),并具有相应的可运行项,如:BSW主程序(BSW MainFunctions),并继续作为模式更改的任意组合,导致BswM执行操作,同时触发和禁用相应的可运行项。
然而从ECU管理器模块的角度来看,ECU是已启动的。接着BSW模式管理器模块启动模式仲裁和所有进一步的BSW的初始化,启动RTE和隐式的启动SW-C成为在BswM的操作列表中被执行的代码,或由依赖模式的调度驱动,有效地在integrator的控制下。
接着初始化NvM模块并调用NvM_Readall,使其也成为集成代码的一部分。这也意味着integrator需负责在NvM_ReadAll结束时,触发Com、DEM和FIM的初始化。当NvM_ReadAll完成时,NvM将通知BswM。
注意: RTE可以在NvM和COM被初始化之后启动。同时通信堆栈无需在COM模块被初始化之前被完全初始化(fully initialized)。
这些更改将初始化BSW模块,并以任意顺序启动SW-C,直到ECU达到满负荷,并且这些更改也将继续决定ECU的功能。最终模式开关停止SW-C,并对BSW进行去初始化,以便在ECU达到可以关闭电源的状态时,UP阶段结束。
因此就ECU管理器模块而言,BSW和SW-C会一直运行,直到它们准备好,让ECU关闭或进入睡眠状态。
有关如何设计模式驱动的ECU管理以及相应地配置BSW模式管理器的指导,可参阅模式管理指南[4]。
6.1.3. SHUTDOWN阶段
SHUTDOWN阶段处理基础软件模块的受控关闭,最终导致选定的关机目标:关闭(OFF)或者复位(RESET)。
6.1.4. SLEEP阶段
ECU在SLEEP阶段保持节能(saves energy)状态。通常不执行任何代码,但依旧会提供供电。如果进行了相应配置,则ECU在此状态下是可被唤醒的。ECU管理器模块提供了一组可配置的(硬件)睡眠模式,这些模式通常是在功耗和重启ECU所需时间之间进行权衡。
ECU管理器模块唤醒ECU,以响应预期或非预期的唤醒事件。由于非预期的唤醒事件需要被忽略,ECU管理器模块提供了一个协议来验证唤醒事件。该协议指定了处理唤醒源的驱动程序和ECU管理器之间的协作过程(可参见第6.6.4节)。
6.1.5. OFF阶段
下电时,ECU的状态为OFF状态。在此状态下ECU可能是可以被唤醒的,但仅适用于具有集成电源控制的唤醒源。在任何情况下,ECU都必须是可启动的。例如:通过复位事件(reset event)。
6.2. ECU管理器的结构描述
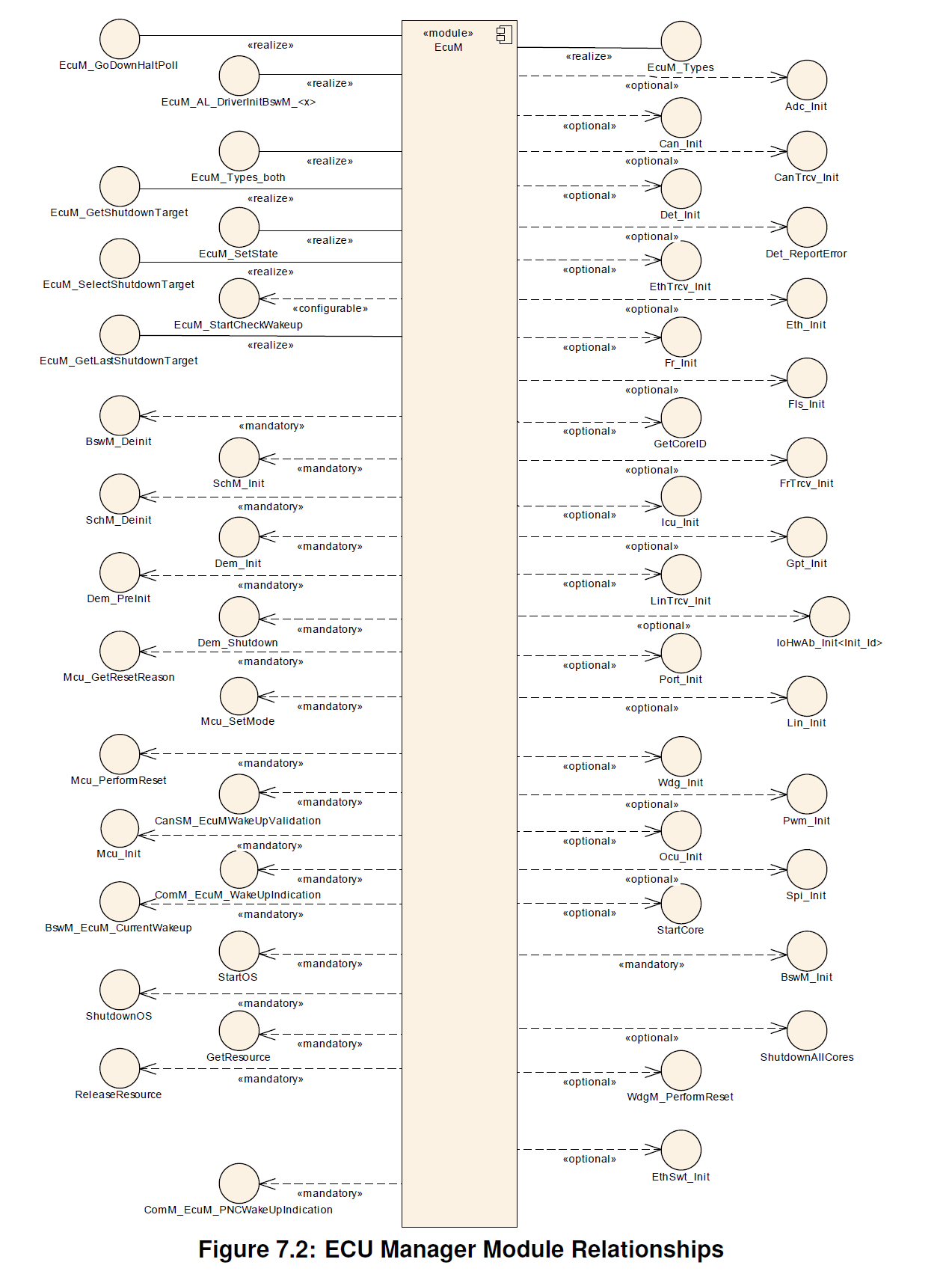
图7.2说明了ECU 管理器模块与其他基础软件模块接口的关系。在大多数情况下,ECU管理器模块只负责初始化。 然而有些模块与ECU管理器模块具有功能关联,这将在以下段落中进行详细解释。
6.2.1. 标准化AUTOSAR软件模块
一些基础软件的驱动程序模块会在被ECU管理器模块唤醒时被初始化(initialized)、关闭(shut down)和重新初始化(re-initialized)。
操作系统也需经过ECU管理器模块进行初始化和关闭。在操作系统初始化之后,ECU管理器模块在将控制权交给BswM之前,一些额外的初始化步骤需被执行。在操作系统关闭之前,BswM将执行控制权交还给ECU管理器模块。详细信息可参考章节6.3启动(STARTUP)和 6.4 关闭(SHUTDOWN)。
6.2.2. 软件组件
软件组件(SW-Components)包含了AUTOSAR ECU的应用程序代码。SW-C通过使用AUTOSAR的端口与ECU管理器模块进行交互。
6.3. STARTUP阶段
有关STARTUP阶段的概述说明,可参见章节6.1.1。
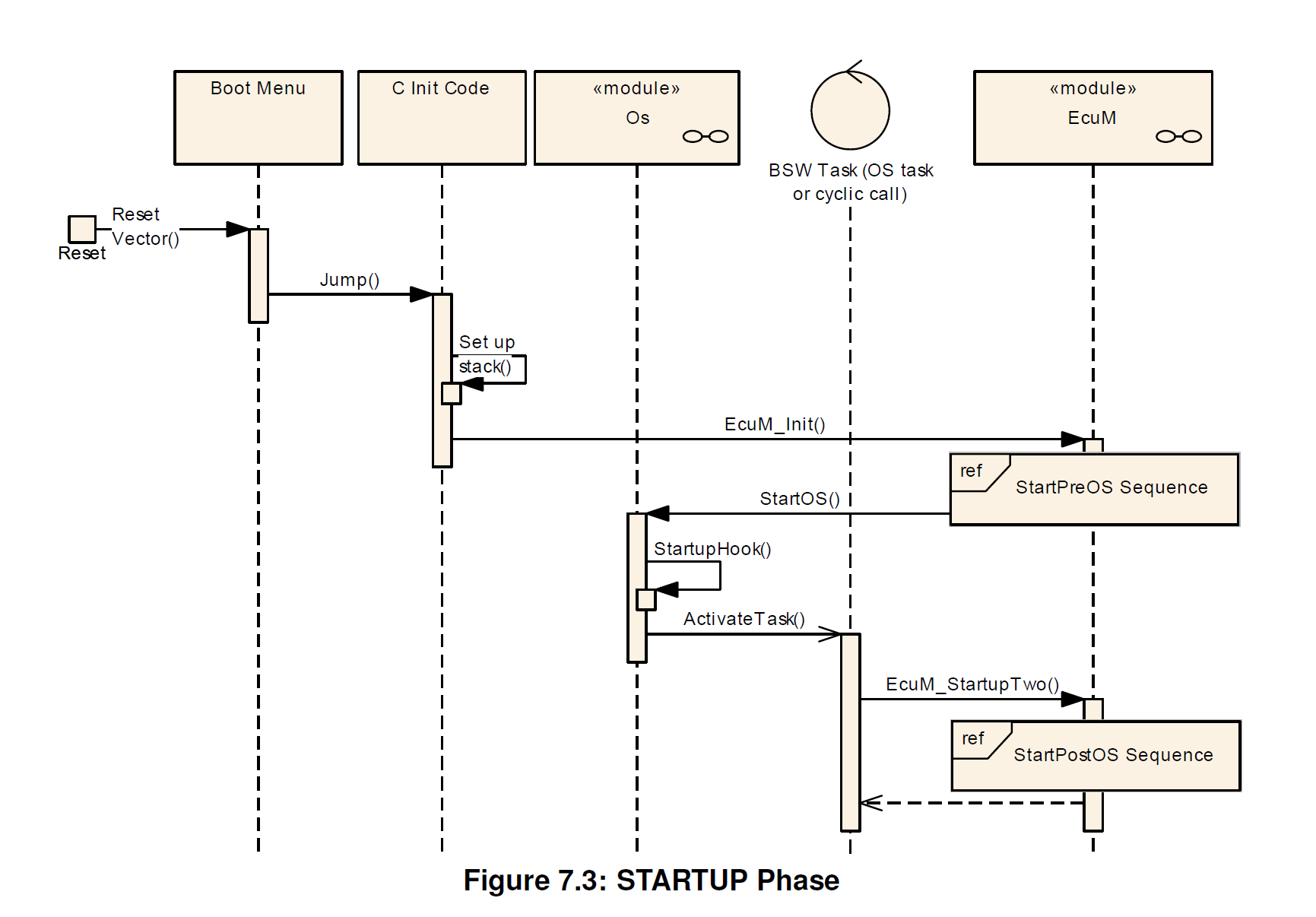
图7.3显示了ECU的启动行为。当EcuM_Init被调用后,ECU管理器模块开始控制ECU启动过程。通过调用StartOS,ECU管理器模块暂时放弃控制。为了重新获得控制权,Integrator需要实现一个自启动的操作系统任务(OS task),并调用EcuM_StartupTwo作为此任务(Task)的第一个操作。
6.3.1. EcuM_Init之前的活动
ECU管理器模块在调用EcuM_Init之前,假定MCU的最小化的初始化过程已经完成。也就是说堆栈已被设置,并且代码已经可以被执行,同时C语言中所有变量的初始化也已经被执行。
6.3.2. StartPreOS 序列中的活动
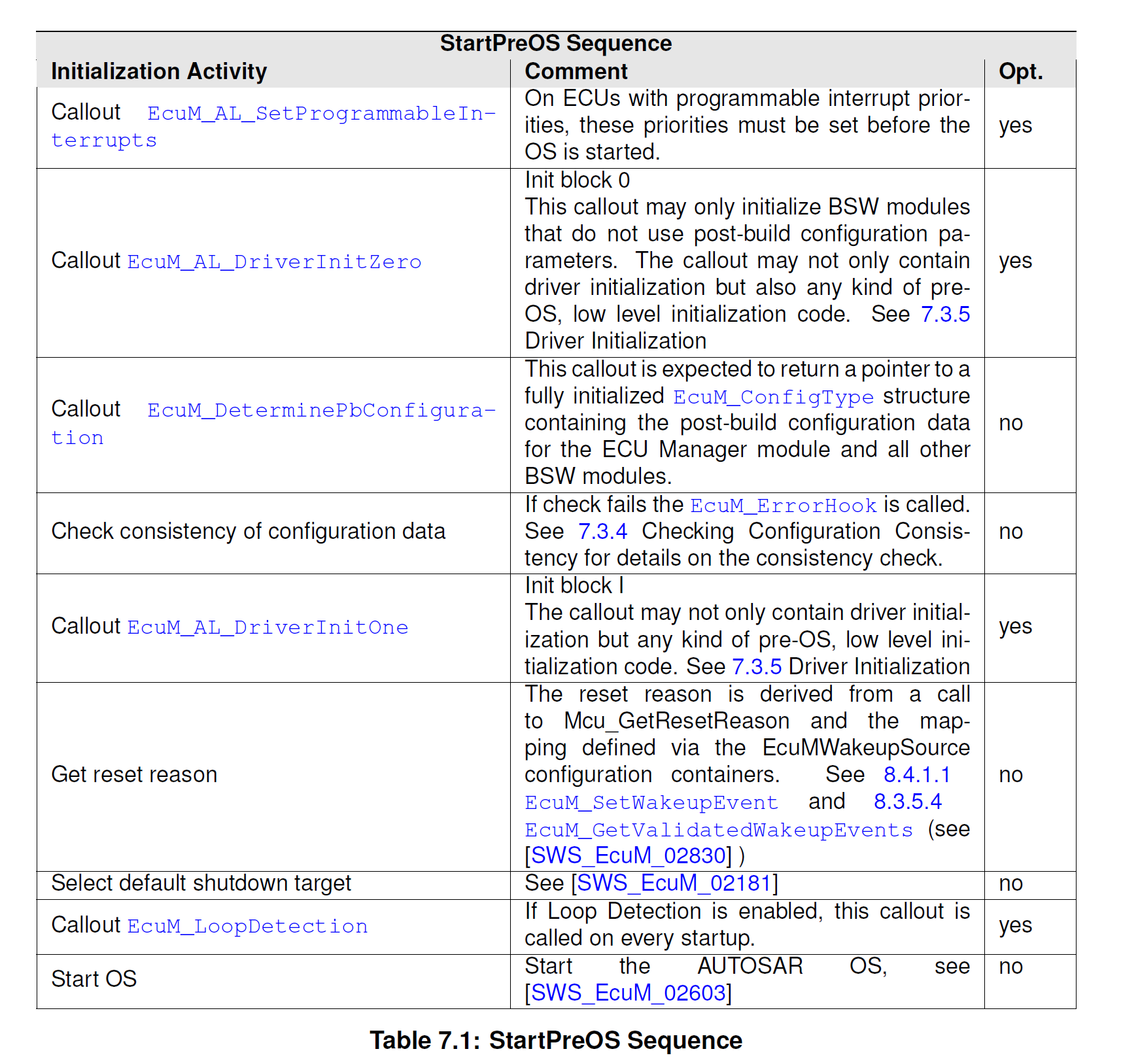
下列StartPreOS Sequence的表格,显示了在StartPreOS序列中的所有活动,以及它们在EcuM_Init中应被执行的顺序。
注意:
可选列(Opt.),所有可选的活动都可以通过配置来被激活或关闭。
ECU管理器模块需记住复位原因转换产生的唤醒源,可参见StartPreOS Sequence表格。同时唤醒源必须由EcuM_MainFunction进行验证,可参见章节6.6.4的 WakeupValidation序列中的活动。
当功能通过EcuM_Init被激活时,ECU管理器模块会执行StartPreOS序列中的操作,详情可参见StartPreOS Sequence表格)。
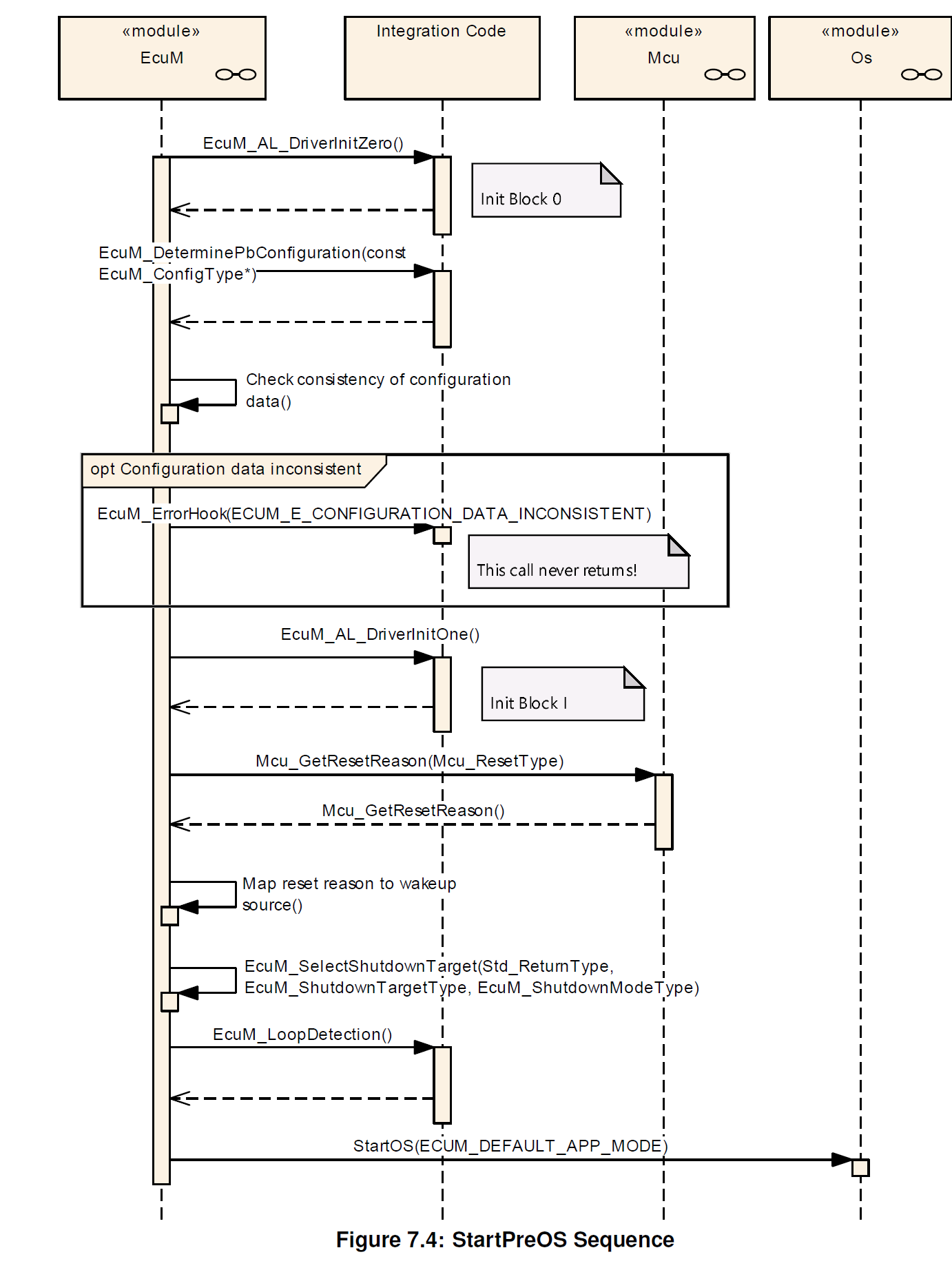
StartPreOS序列旨在让ECU为初始化OS做好准备,所以执行时间应尽可能短。驱动程序应尽可能在UP阶段初始化,并且Callout函数也应保持简短。在此序列期间,中断不应被使用。如果必须使用中断,则StartPreOS序列中只允许使用I类(category I)的中断。
驱动程序和硬件抽象模块的初始化不是由ECU管理器来严格定义的。但ECU管理器提供了两个Callout函数EcuM_AL_DriverInitZero和EcuM_AL_DriverInitOne来定义初始化块 0和1。这些初始化块包含了与StartPreOS序列相关的初始化活动。
MCU_Init并不提供完整的MCU的初始化。此外与硬件相关的步骤必须被执行,并且必须在系统设计时被定义。这些步骤应该在EcuM_AL_DriverInitZero或者EcuM_AL_DriverInitOne两个Callout函数中进行。详细信息可在MCU驱动程序规范[11]中找到。
ECU管理器模块需使用配置的默认关机目标(通过EcuMDefaultShutdownTarget配置)来调用EcuM_GetValidatedWakeupEvents接口。具体内容可参阅章节6.7关机目标(Shutdown Targets)的内容。
StartPreOS序列需为启动操作系统,初始化所需的所有基础软件模块。
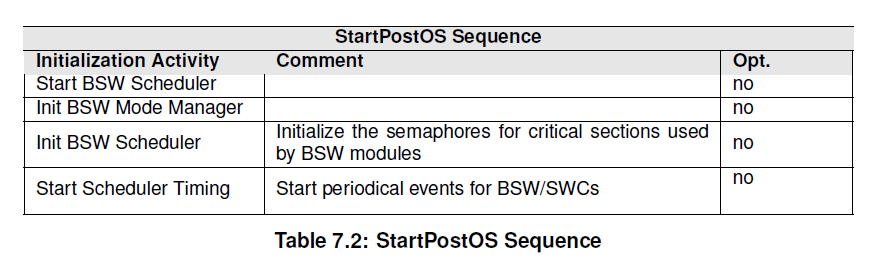
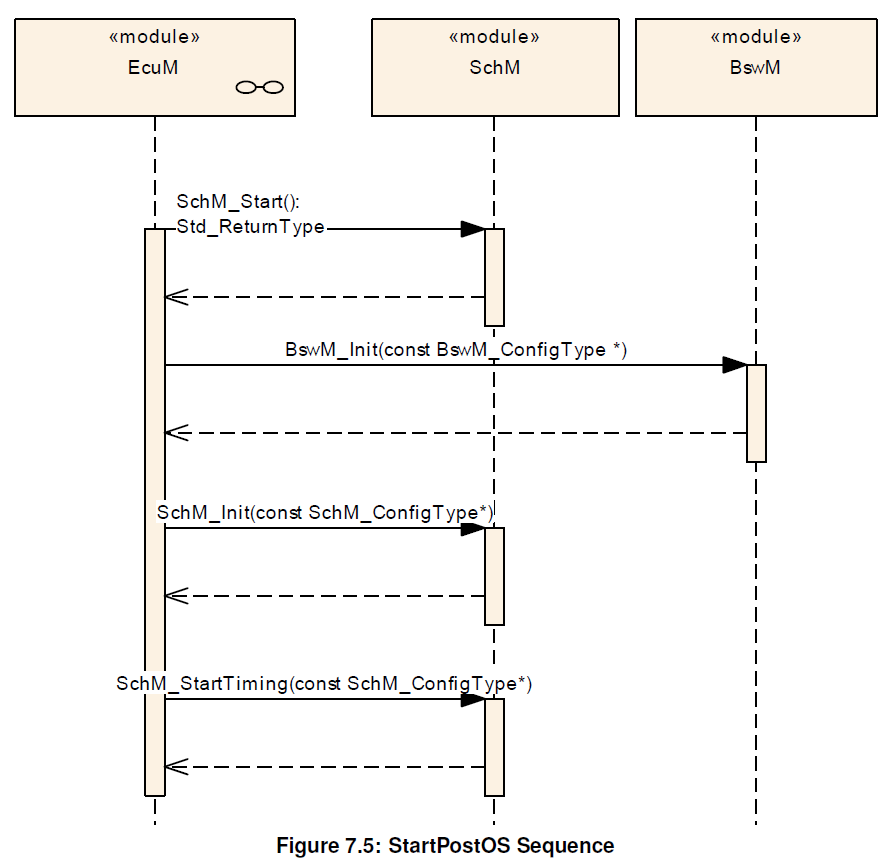
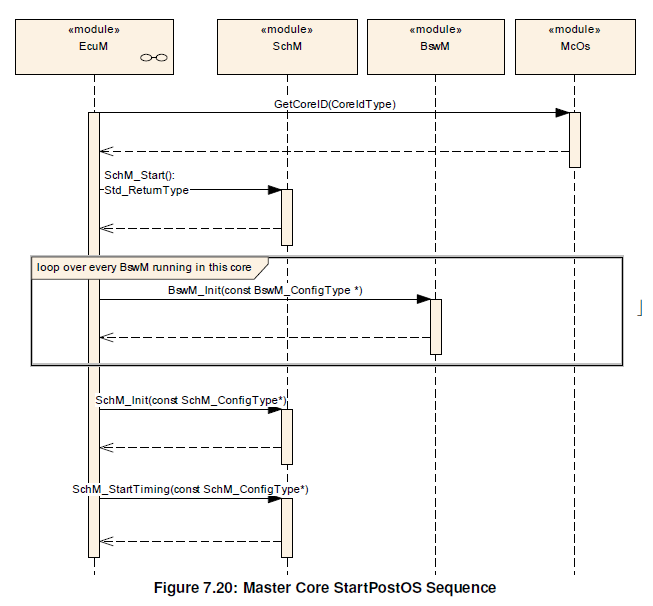
6.3.3. StartPostOS序列中的活动
当功能通过EcuM_StartupTwo被激活时,ECU管理器模块需执行StartPostOS序列中的操作,具体内容可参见表7.2。
注意:
可选列(Opt.),所有可选的活动都可以通过配置来被激活或关闭。
6.3.4. 驱动程序初始化
驱动程序在初始化过程中的位置很大程度上取决于其实现和目标硬件设计。
驱动程序可以在STARTUP阶段的初始化块0(Init Block 0)或初始化块1(Init Block 1)Callout函数中,被ECU管理器模块初始化,或者在WakeupRestart Sequence的 EcuM_AL_DriverRestart的Callout函数中重新被初始化。驱动程序也可以在UP阶段,由BswM初始化或重新初始化。
本章节适用于那些AUTOSAR基础软件的驱动程序,不包括SchM和BswM,他们的初始化和重新初始化都是由ECU管理器模块处理,而不是BswM模块处理的。
ECU管理器模块的配置需指定init block 0和init block 1内的初始化调用顺序。具体参见EcuMDriverInitListZero和EcuMDriverInitListOne。
ECU管理器模块需使用从驱动程序的EcuMModuleService配置容器中派生的参数,来调用每个驱动程序的初始化(init)函数。
对于WakeupRestart期间的重新初始化,integrator需使用EcuMDriverRestartList,将重新启动块(restart block)集成到EcuM_AL_DriverRestart的集成代码中。
EcuMDriverRestartList接口可能包含用作唤醒源的驱动程序。EcuM_AL_DriverRestart需重新启动这些驱动程序唤醒检测(wakeup detected)回调函数的触发机制。可参阅章节6.5.5的WakeupRestart序列中的活动。
ECU管理器模块需按照与init block 0和init block 1的组合列表相同的顺序初始化EcuMDriverRestartList中的驱动程序。通常EcuMDriverRestartList只会包含init block 0和init block 1驱动程序组合列表的子集。
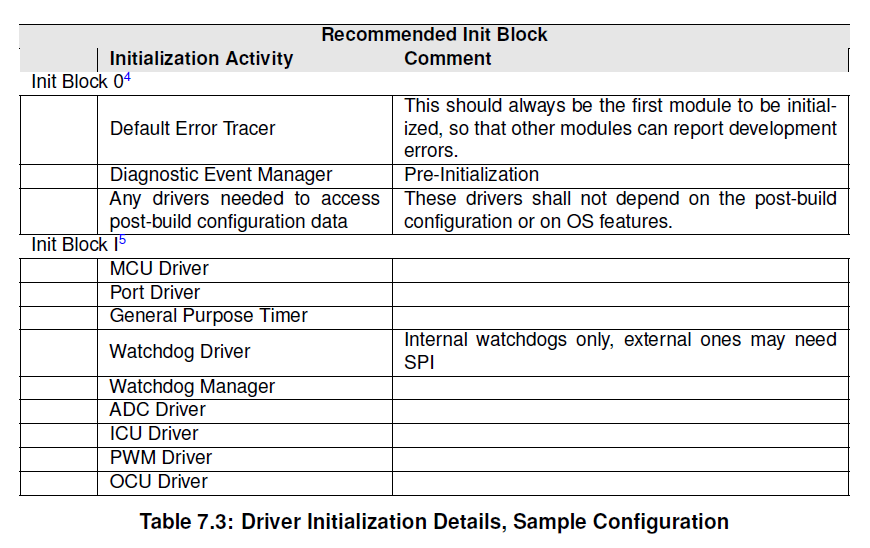
表7.3显示了init block 0和init block 1的一种可能和推荐的活动序列。根据硬件和软件配置,可以添加或移除相关的基础软件模块,当然也可以使用其他活动序列。
6.3.5. BSW 初始化
其余的BSW模块由BSW模式管理器初始化,通过使用配置的(EcuMDriverInitListBswM)初始化函数列表,创建的ECU管理器的配置函数(EcuMDriverInitCalloutName)。
ECU管理器模块的配置应指定BSW初始化函数中的初始化调用顺序(可参见:EcuMDriverInitListBswM)。
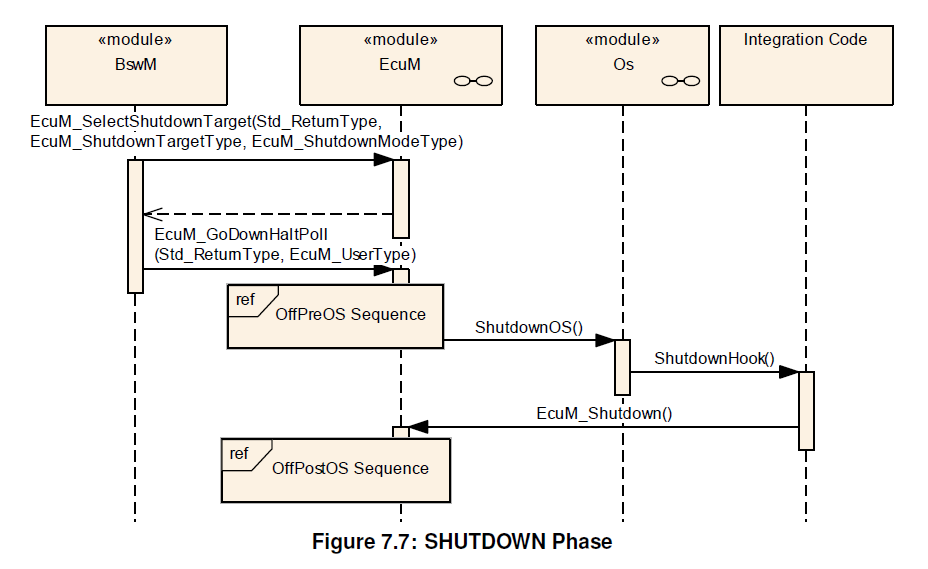
6.4. SHUTDOWN阶段
有关SHUTDOWN阶段的概念,请参阅章节6.1.3 SHUTDOWN 阶段。通过使用关机目标RESET或OFF调用EcuM_GoDownHaltPoll来启动SHUTDOWN阶段。
如果在关机阶段发生唤醒事件时,ECU管理器模块应完成关机并在此后立即重新启动。
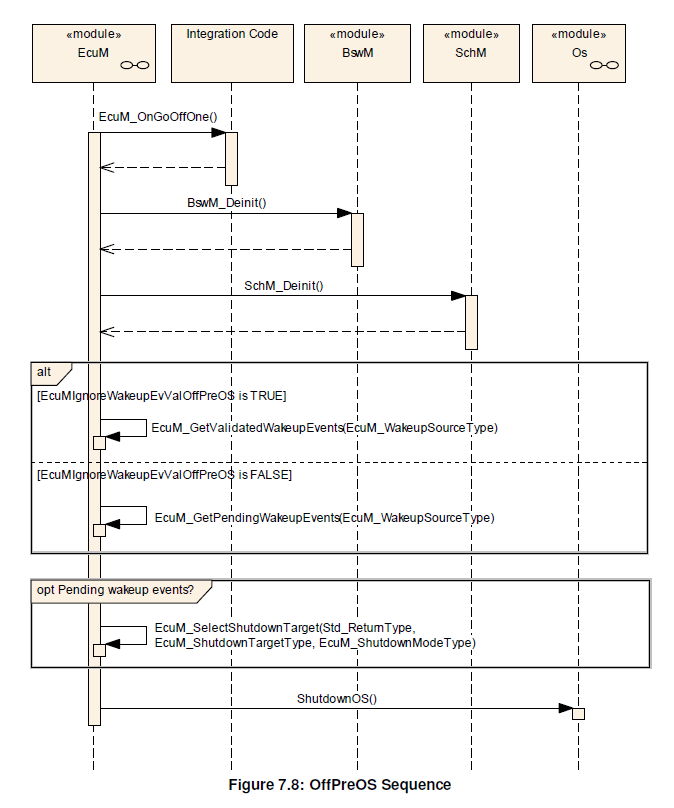
6.4.1. OffPreOS序列中的活动
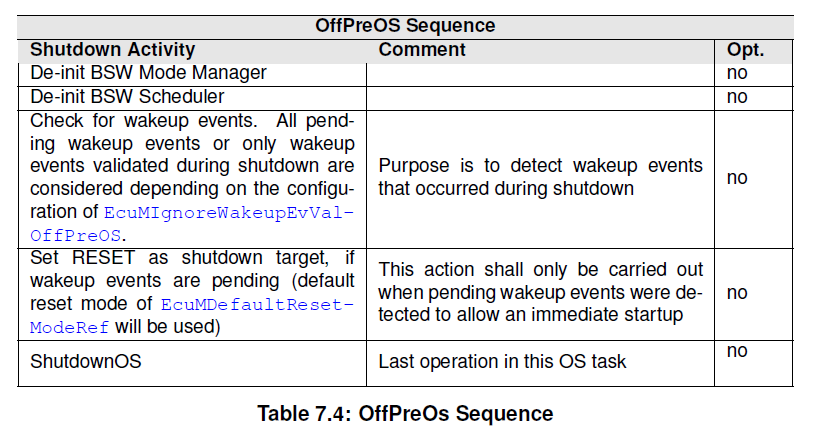
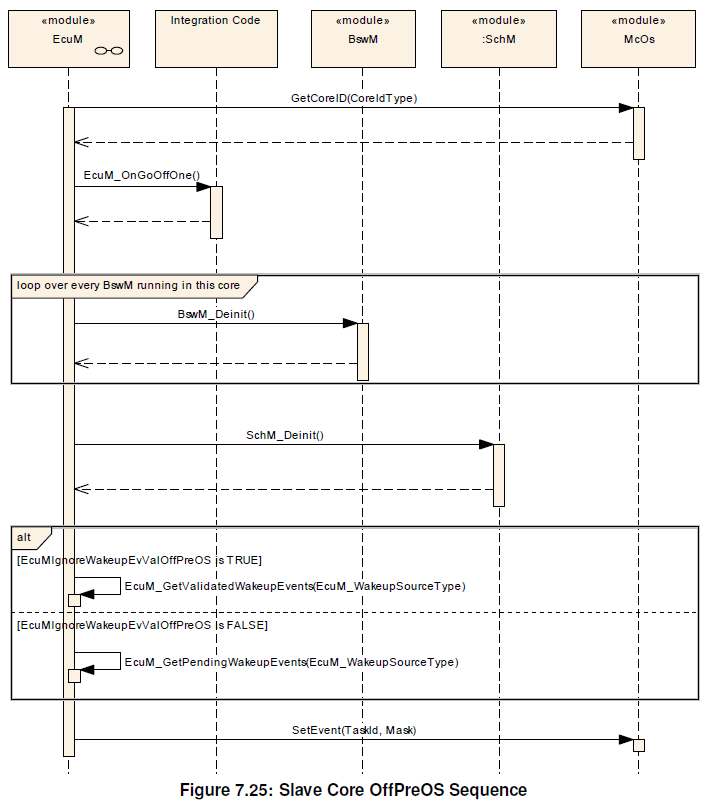
在OffPreOS序列期间,如果配置参数EcuMIgnoreWakeupEvValOffPreOS设置为true,只需考虑那些不需要验证的唤醒事件,所有其他的唤醒事件可以忽略。如果配置参数EcuMIgnoreWakeupEvValOffPreOS设置为false时,不需要验证的唤醒事件和需要验证的待定唤醒事件都需被考虑到。
注意:
因为在OffPreOS序列期间,SchM已经去初始化,周期性执行的函数以及不被执行,所以不再可能验证唤醒源。在OffPreOS期间中,唤醒事件是否需要被考虑,取决于EcuMIgnoreWakeupEvValOffPreOS的配置。
作为OffPreOS期间的最后一项活动,ECU管理器模块需调用ShutdownOS函数。操作系统会在关机结束时,调用关机钩子(hook)函数。关闭钩子函数会调用EcuM_Shutdown来结束关机过程。 EcuM_Shutdown不应返回,而是直接关闭ECU或发起复位动作。
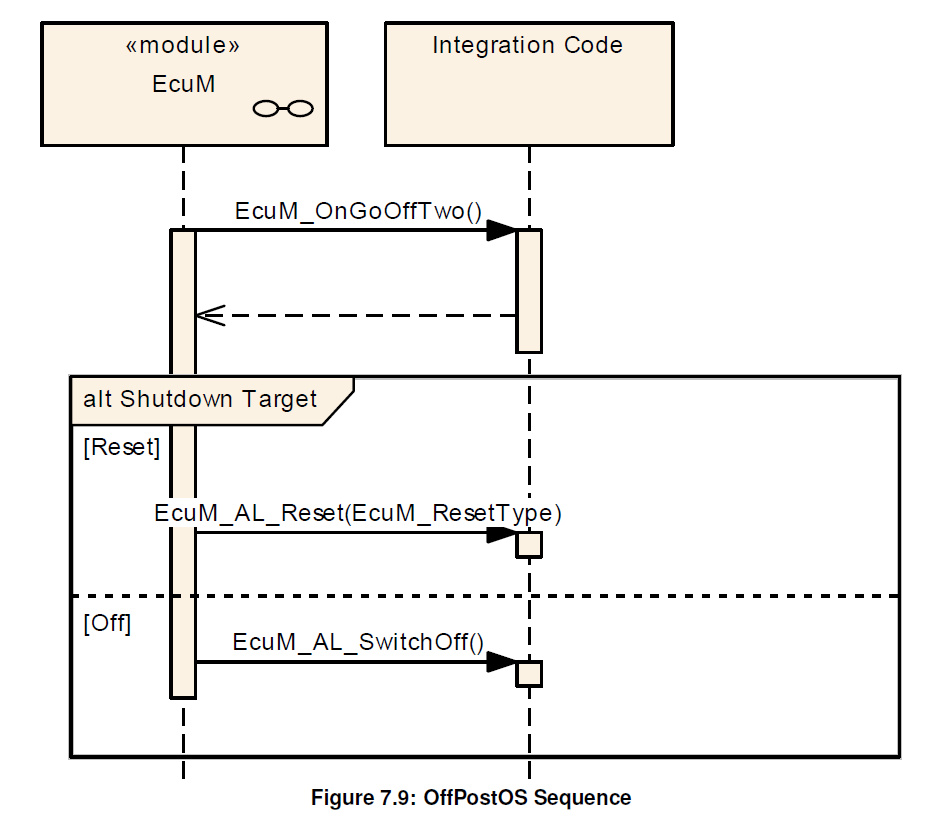
6.4.2. OffPostOS序列中的活动
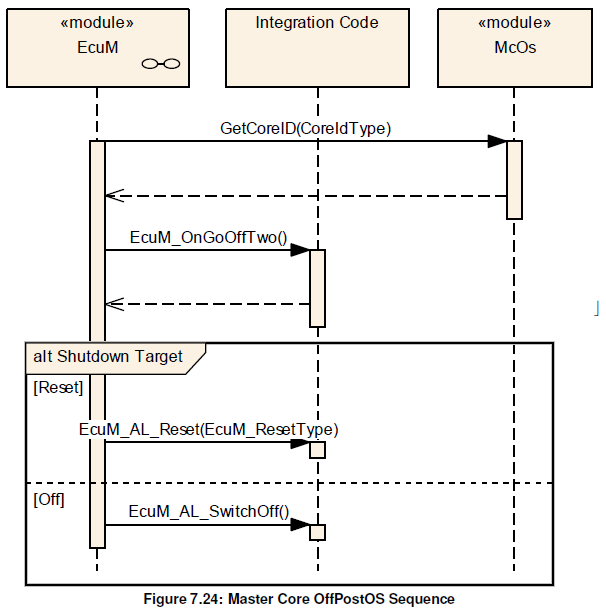
OffPostOS序列执行了在操作系统关闭后,达到关机目标的最后步骤。由EcuM_Shutdown函数发起此序列。关机目标可以是ECUM_SHUTDOWN_TARGET_RESET或ECUM_SHUTDOWN_TARGET_OFF,具体的复位方式由复位模式决定。有关详细信息,可参阅章节6.7关机目标
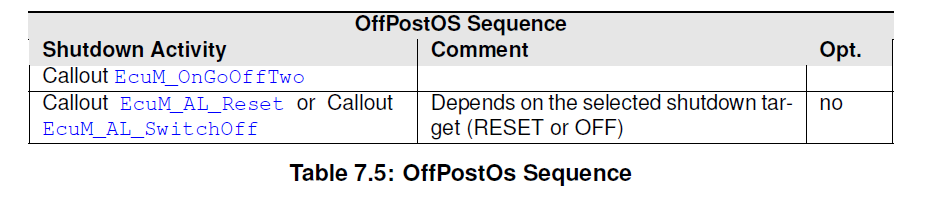
当关机目标为RESET时,ECU管理器模块需调用EcuM_AL_Reset的Callout函数。当关机目标为OFF时,ECU管理器模块需调用EcuM_AL_SwitchOff的Callout函数。
6.5. SLEEP阶段
有关SLEEP阶段的概述,可参阅章节6.1.4 SLEEP阶段。可以通过SLEEP作为关机目标,调用EcuM_GoDownHaltPoll函数来启动SLEEP阶段。
使用SLEEP作为关机目标的EcuM_GoDownHaltPoll函数会启动两种控制流。具体哪种控制流取决于EcuMSleepModeSuspend参数所配置的睡眠模式。它们在实现睡眠的机制上的结构是不同。但是它们在准备睡眠和从睡眠恢复过程的顺序却是相同的。
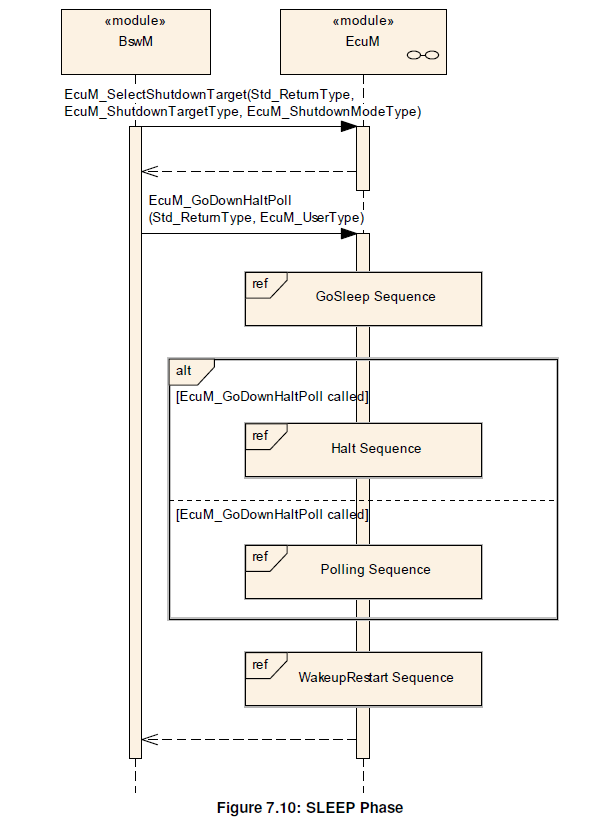
同时存在另一个模块,可能是BswM,虽然它也可能是另一个SW-C。这个模块必须确保在调用EcuM_GoDownHaltPoll之前,以及选择了适当的ECUM_STATE_SLEEP的关机目标。
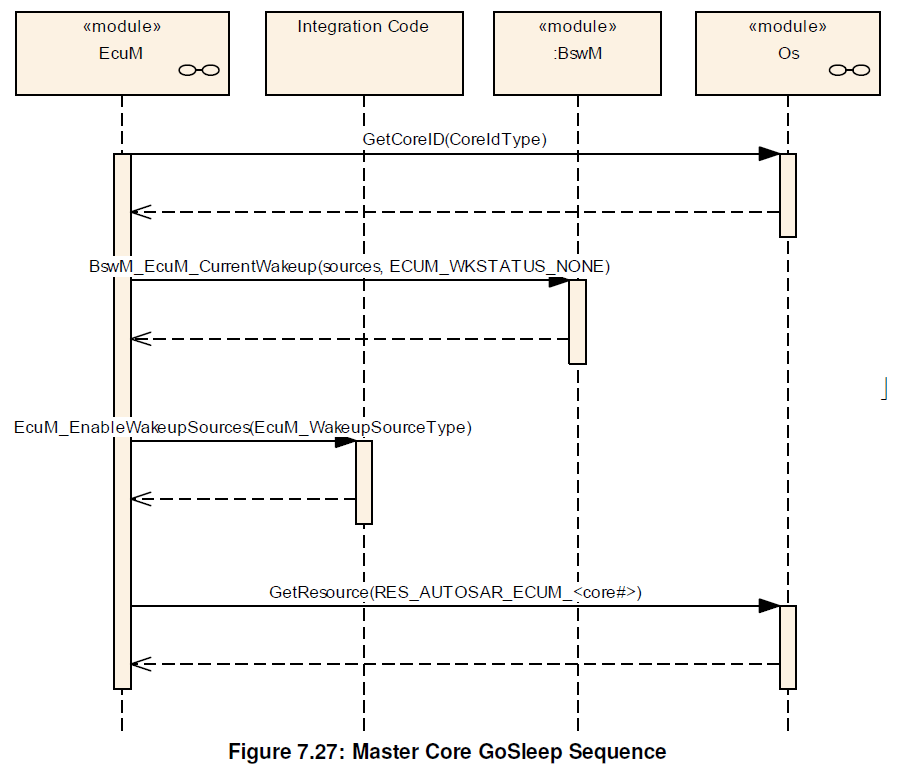
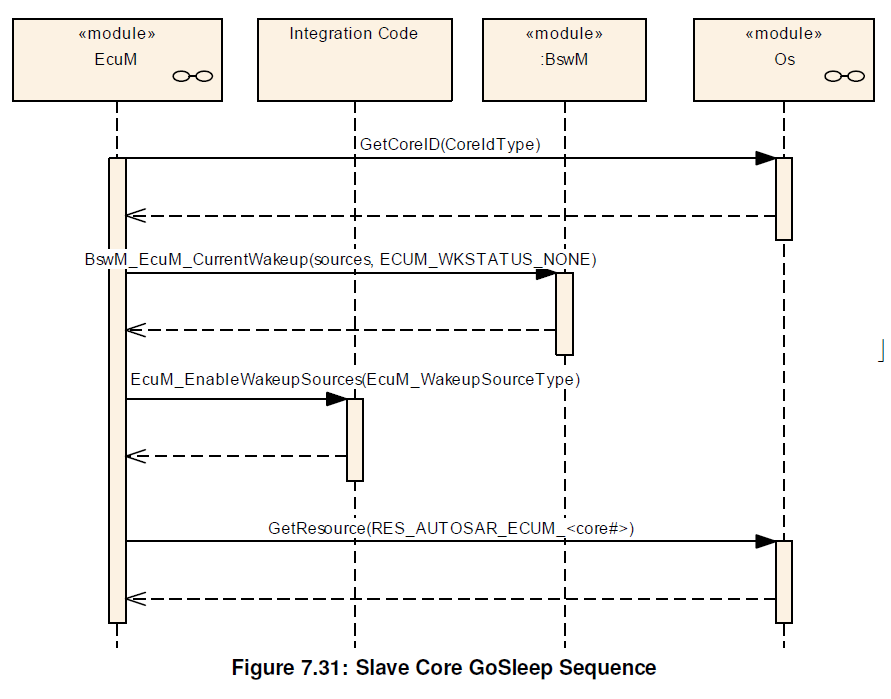
6.5.1. GoSleep序列中的活动
在GoSleep的序列中,ECU管理器模块需为即将到来的睡眠阶段进行相关的硬件配置,同时为下一个唤醒事件设置ECU。
ECU管理器模块为了接着的睡眠模式,需进行唤醒源的配置。ECU管理器模块会通过在EcuM_EnableWakeupSources的Callout函数中,依次为每个在EcuMWakeupSourceMask中配置的唤醒源执行相关的设置工作。
与SHUTDOWN阶段相比,ECU管理器模块在进入SLEEP阶段时,不应关闭操作系统。睡眠模式,即EcuM的SLEEP阶段和MCU模式的组合,对操作系统来说应该是透明的。
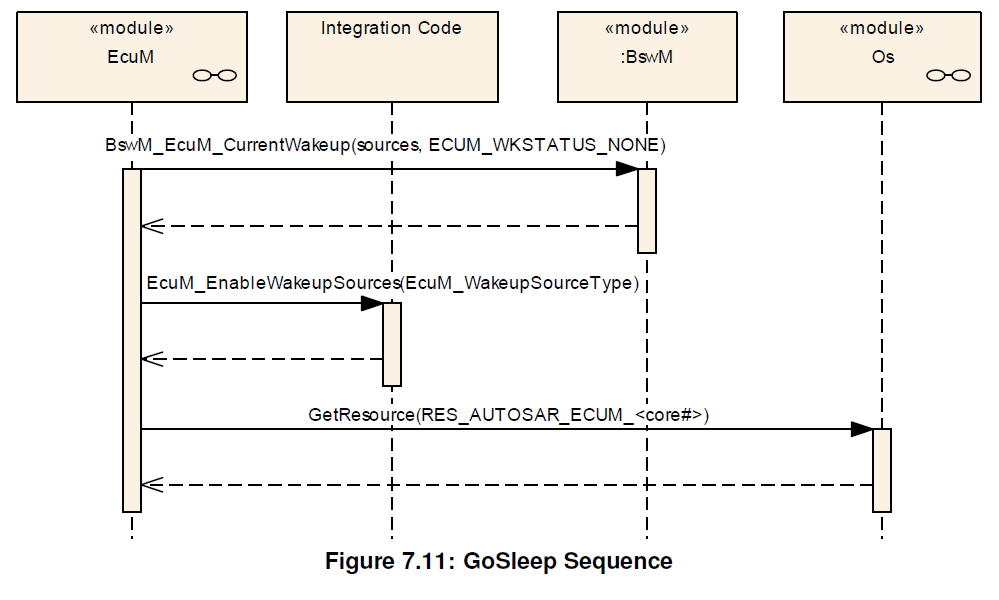
当在多核的ECU上运行时,EcuM需要为每个内核保留一个专用资源(RES_AUTOSAR_ECUM)。该资源会在进入休眠(Go Sleep)期间分配。
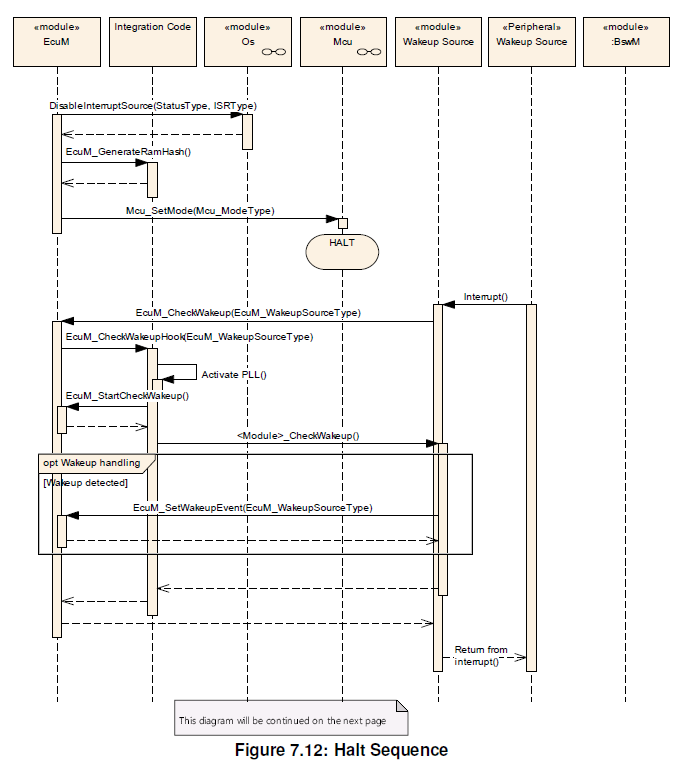
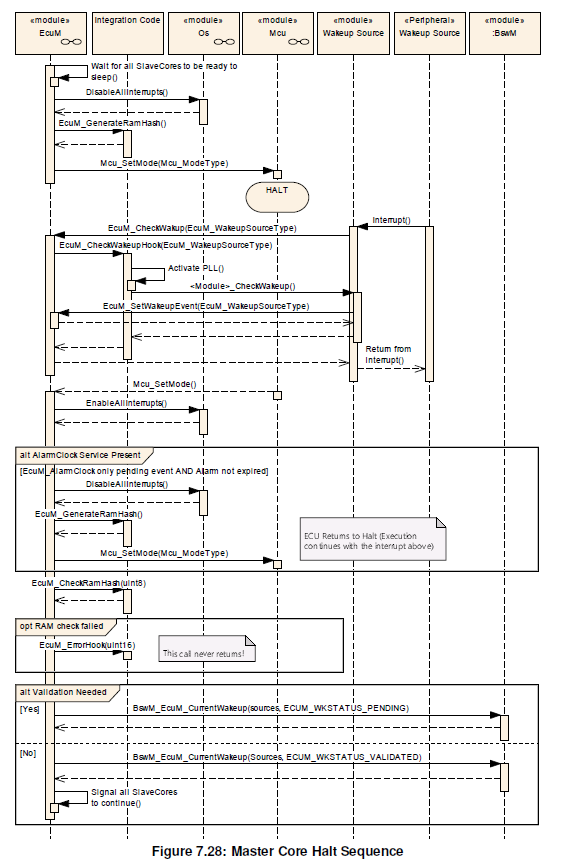
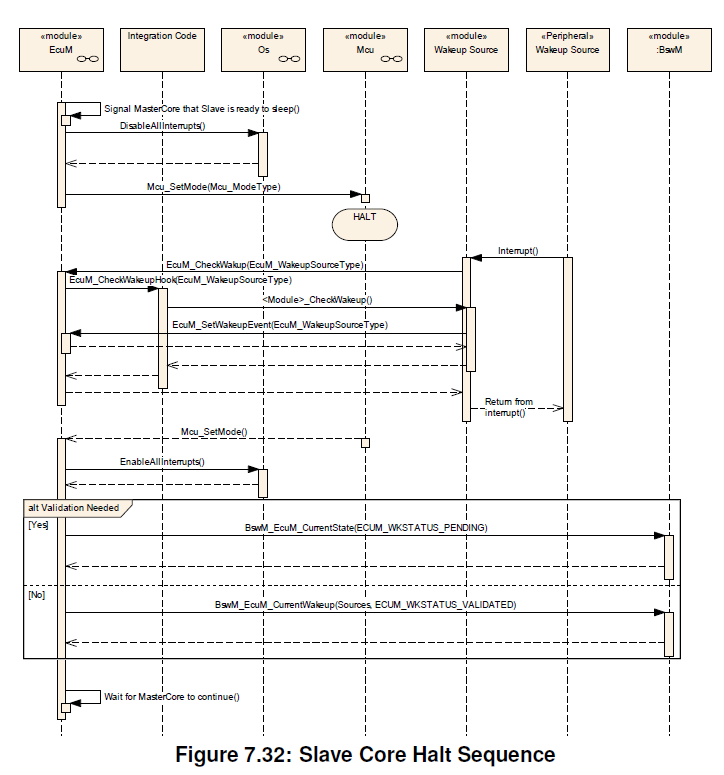
6.5.2. 停止序列中的活动
ECU管理器模块需在停止微控制器的睡眠模式下执行停止序列(Halt Sequence)。在这睡眠模式下,ECU管理器模块不执行任何代码。
ECU管理器模块应在停止微控制器之前,调用EcuM_GenerateRamHash的Callout函数。然后当处理器从停止状态返回后,调用EcuM_CheckRamHash的Callout函数。
如果存在多核的情况,且存在从属(Slave)的EcuM,则此检查动作仅只需在主(Master)的EcuM上执行。 主EcuM从其范围内的所有数据中生成散列。从属EcuM的私有数据不在此范围内。
逻辑依据:
当ECU长时间处于睡眠模式时,RAM内存可能会损坏。 因此需检查RAM存储器的完整性,以防意外行为的发生。系统设计者可以选择适当的校验和算法来执行检查。
ECU管理器模块应调用EcuM_GenerateRamHash,系统设计人员可以在此Callout函数中进行RAM完整性地检查。
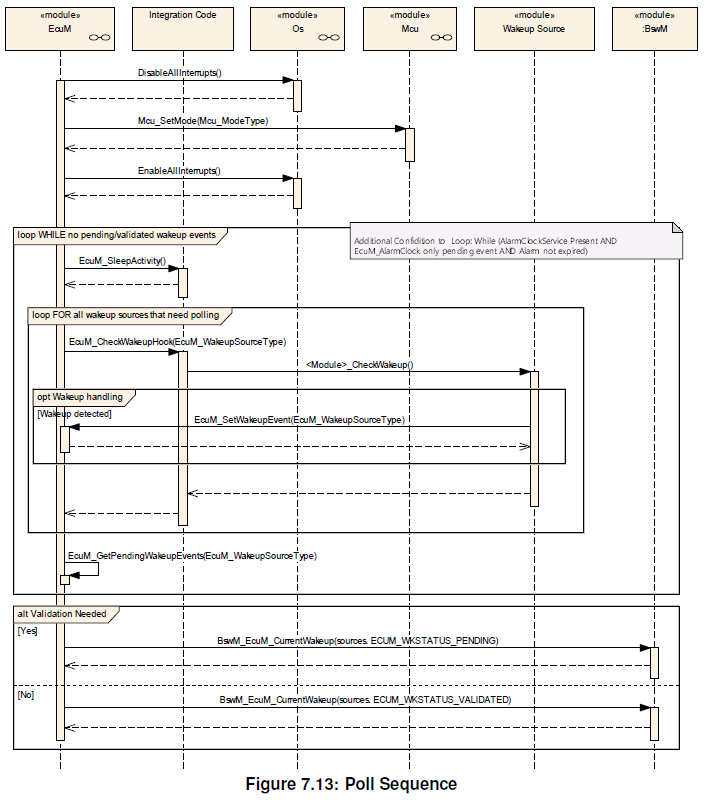
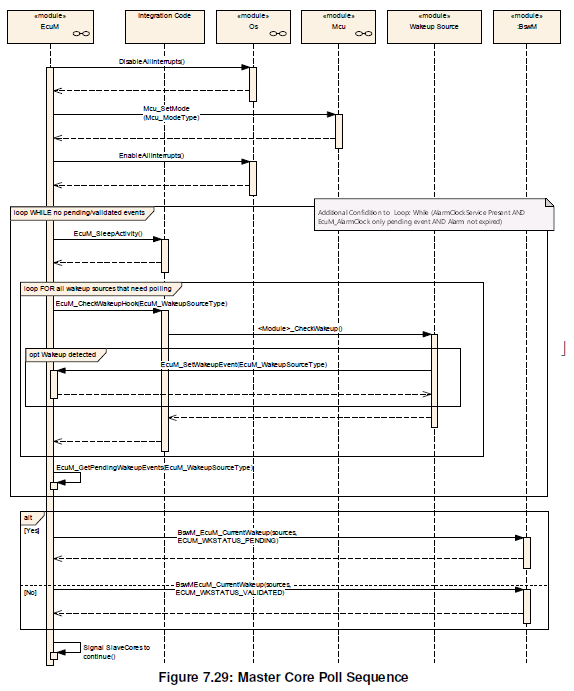
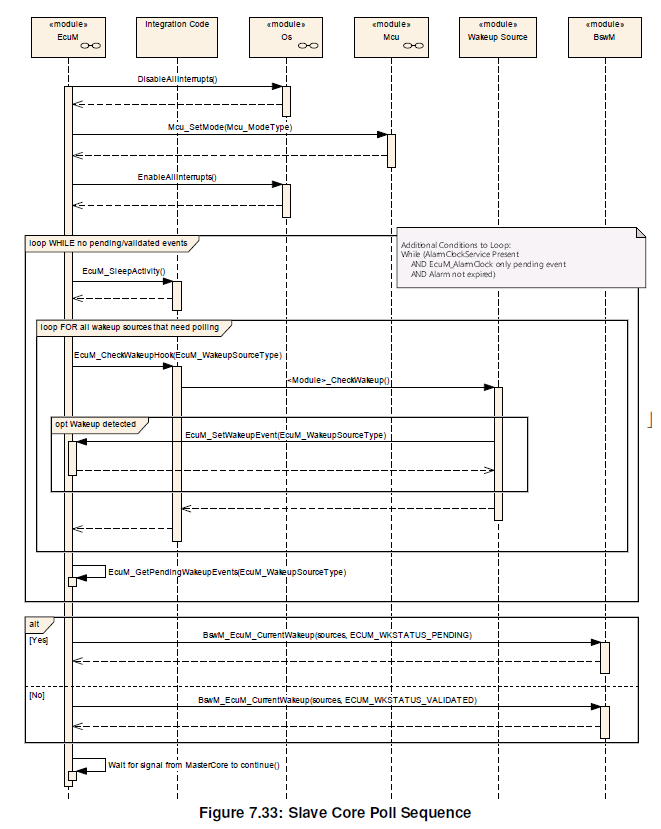
6.5.3. 轮询序列中的活动
睡眠模式下的轮询序列(Poll Sequence)可用于检查唤醒源。在轮询序列中,EcuMWakeupSourcePolling设置为True,EcuM需在一个阻塞循环中(blocking loop),调用EcuM_SleepActivity和EcuM_CheckWakeupHook函数,直到有待定(pending)或者已验证(validated)的唤醒事件被报告。
6.5.4. 离开停止或轮询
如果当ECU处于停止(Halt)或轮询(Poll)状态时,发生唤醒了事件。
- 唤醒硬线发生翻转变化(toggling a wakeup line)
- CAN总线上有通讯信号(communication on a CAN bus)等
则ECU管理器模块需重新获得控制权,并通过执行唤醒重启序列(WakeupRestart sequence)退出睡眠阶段。
可以调用ISR来处理唤醒事件,但这取决于硬件和驱动程序的实现。具体可参考章节6.5.5WakeupRestart序列中的活动
如果ECU处于Halt或者Poll时,发生了不规则事件(Irregular Events)
- 硬件复位(hardware reset)
- 电源循环(power cycle)
则ECU管理器模块需在STARTUP阶段,重新启动ECU。
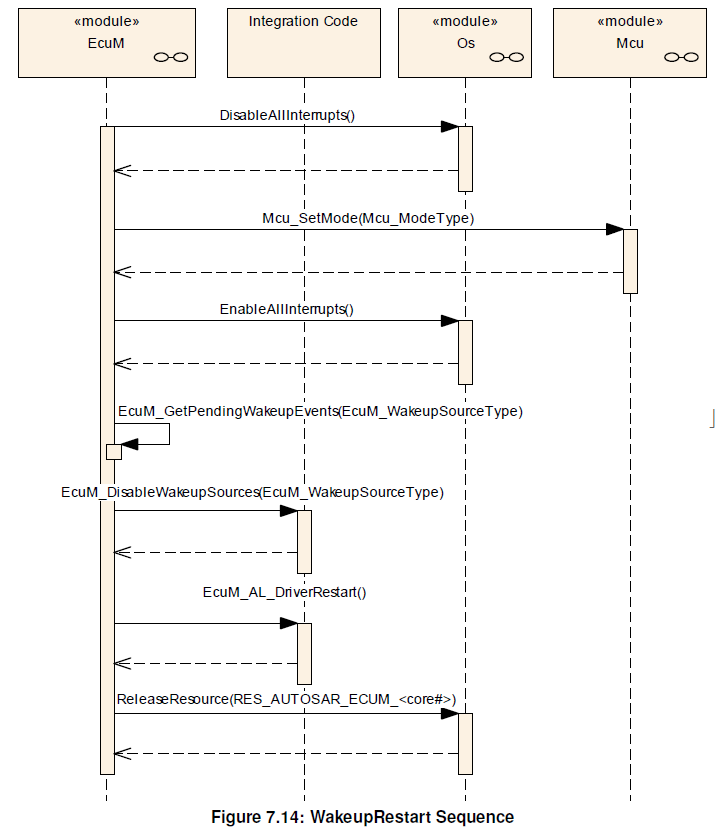
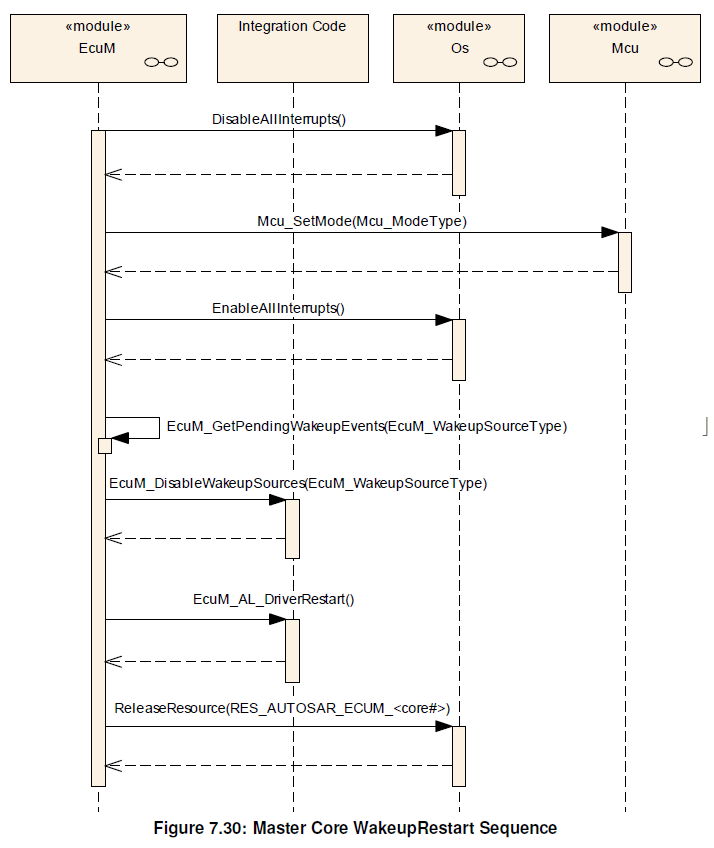
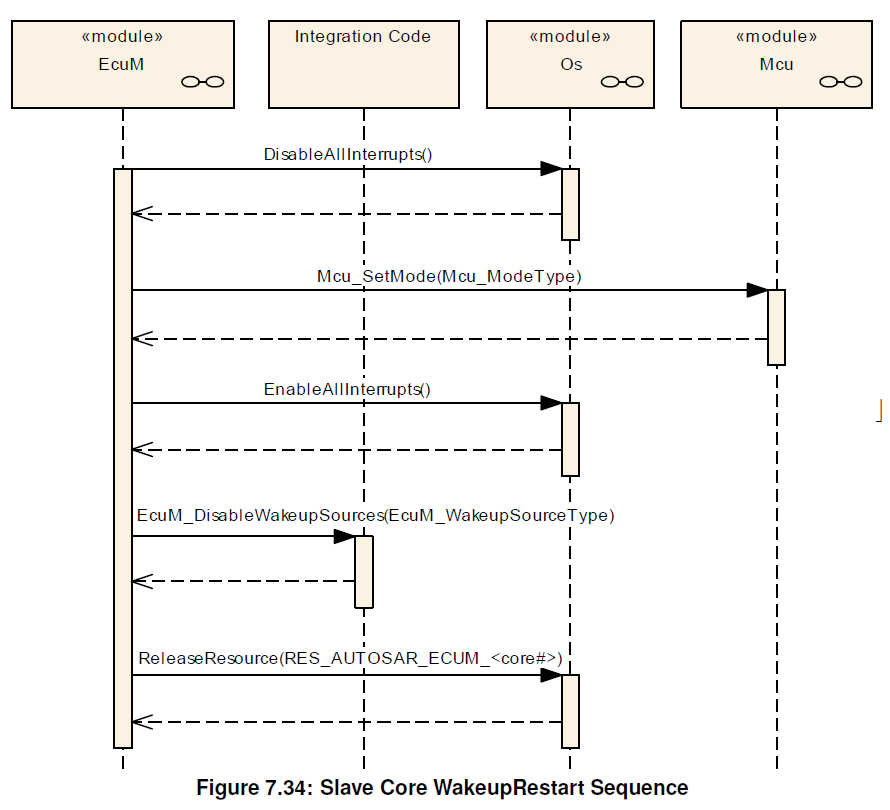
6.5.5. WakeupRestart序列中的活动
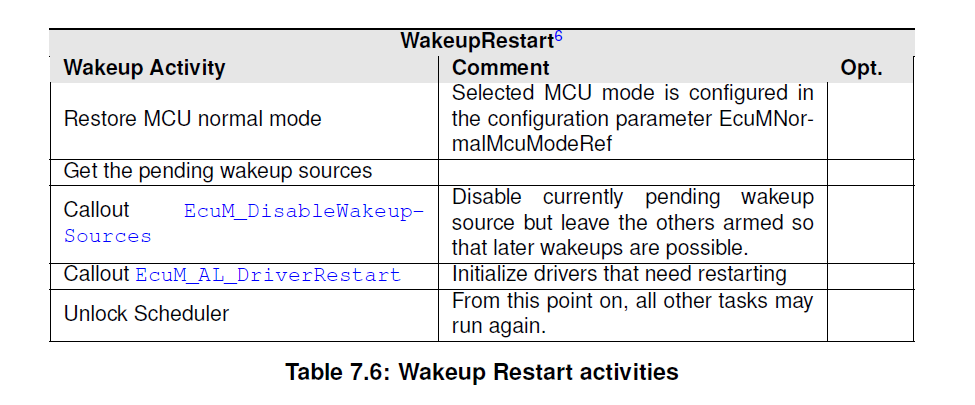
ECU管理器模块需调用用于重新初始化驱动程序的EcuM_AL_DriverRestart的Callout函数。其中具有唤醒源的驱动程序通常需要重新初始化。有关驱动程序初始化的更多详细信息,可参考章节6.3.4驱动程序初始化。
在重新初始化(re-initialization)期间,驱动程序必须检查其一个分配的唤醒源是否是先前被唤醒的原因。如果该测试为真,驱动程序必须调用唤醒被检测到(wakeup detected)的回调函数。例如:参见CAN 收发器驱动程序规范[12]。而后者必须再调用EcuM_SetWakeupEvent函数。
驱动程序的实现应该只调用一次唤醒回调。此后它不应再次调用唤醒回调,直到它被显式函数调用重置(re-armed)。所以驱动程序必须重置后了,才能再次触发回调。
如果在WakeupRestart序列完成时,ECU管理器模块具有候选唤醒源的列表,则ECU管理器模块应在EcuM_MainFunction中验证这些候选唤醒源。可参阅章节6.6.4 WakeupValidation序列中的活动
如果报告了WakeupEvent,EcuM需退出睡眠模式。如果所有WakeupSource的CheckWakeupTimer都已超时,则EcuM需转换到GoSleep状态,并再次开始让EcuM进入睡眠状态(暂停或轮询)。
注意:
当EcuM由异步WakeupSource恢复运行(resume)时,EcuM必须执行WakeRestart序列,以重新启动主功能,以便建立与使用的硬件(例如:SPI)的异步通信。
如果在信号唤醒后,并且相应的CheckWakeupTimer也已经超时,没有任何唤醒事件被设置,则EcuM需报告运行时错误ECUM_E_WAKEUP_TIMEOUT。
6.6. UP阶段
在UP阶段,EcuM_MainFunction会被定期执行。它主要具有三个功能:
- 检查唤醒源是否被唤醒,并在必要时启动唤醒验证。可参阅章节6.6.4 WakeupValidation序列中的活动
- 更新闹钟定时器(Alarm Clock timer)
- 仲裁RUN和POST_RUN的请求和释放。
6.6.1. 闹钟处理
请参阅章节6.8.2 节 UP阶段的EcuM 时钟时间,了解更多实现的细节。
当闹钟服务存在时(可参见参数EcuMAlarmClockPresent),EcuM_MainFunction需更新闹钟定时器。
6.6.2. 唤醒源状态处理
唤醒源不仅需在唤醒期间处理,而且与所有其他EcuM活动并行处理。相关功能在EcuM_MainFunction中运行,通过模式请求(mode requests)与ECU管理的其余部分完全分离。
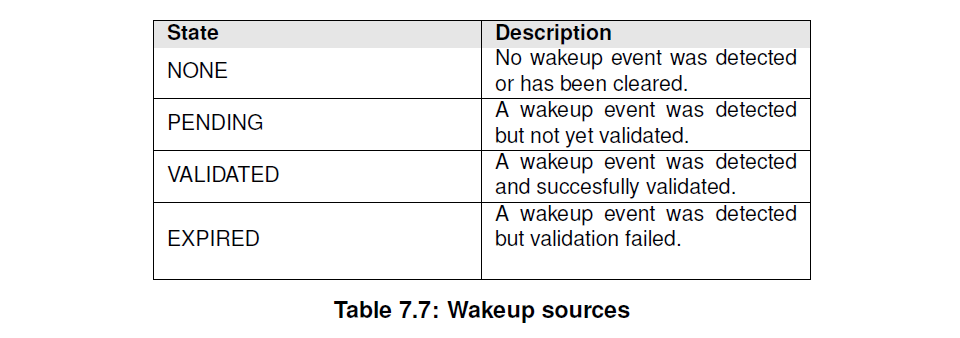
唤醒源可以处于以下状态:
| 状态 | 描述 |
|---|---|
| NONE | 唤醒事件未被检测到或已被清除 |
| PENDING | 检测到唤醒事件但尚未验证 |
| VALIDATED | 检测到唤醒事件并成功验证 |
| EXPIRED | 检测到唤醒事件但验证失败 |
下图说明了唤醒源状态和引起状态变化的条件函数之间的关系。此处仅显示两个超级状态Disabled和Validation以进行说明和更好地理解。
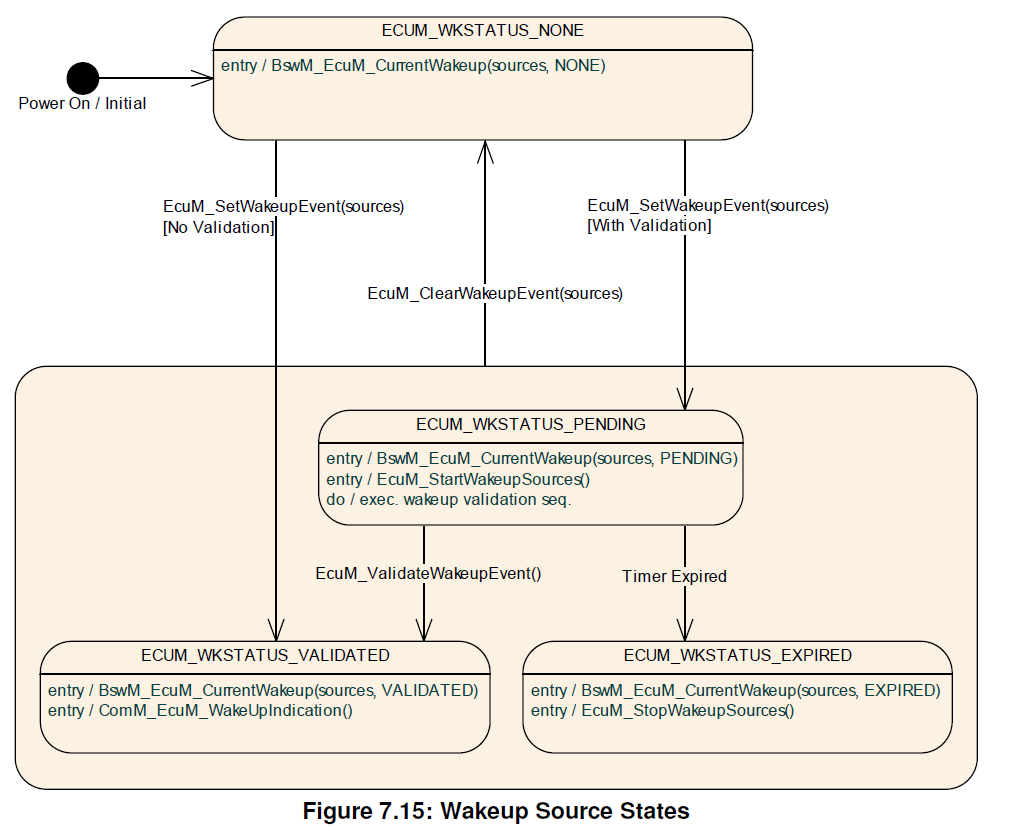
当ECU管理器动作导致唤醒源的状态改变时,ECU管理器模块应向BswM发出模式请求(mode request),以将唤醒源的模式更改为新的唤醒源状态。对于这些唤醒源状态的通信,主要使用 EcuM_WakeupStatusType类型。
当ECU管理器模块处于UP阶段时,唤醒事件通常不会触发状态更改,但是它们会触发停止(Halt)和轮询(Poll)子阶段的结束。接着ECU管理器模块自动执行WakeupRestart 序列后,并随后返回到UP阶段。此行为需由集成商(integrator)在BswM中配置规则,以便ECU对唤醒事件做出正确反应。因为此反应完全取决于当前ECU的状态。
如果唤醒源有效,则BswM将ECU返回到运行(RUN)状态。如果所有唤醒事件都返回到NONE或EXPIRED,则BswM再次为基础软件模块准备SLEEP或OFF并调用EcuM_GoDownHaltPoll。
总结:
每个未决事件(pending event)都被独立验证(如果已配置),EcuM将结果作为模式请求发布到BswM,这反过来可以触发EcuM中的状态更改。
6.6.3. 唤醒状态的内部表示
EcuM管理器模块提供以下接口来确定这些唤醒源的状态:
- EcuM_GetPendingWakeupEvents
- EcuM_GetValidatedWakeupEvents
- EcuM_GetExpiredWakeupEvents
并通过以下接口操作唤醒源的状态:
- EcuM_ClearWakeupEvent
- EcuM_SetWakeupEvent
- EcuM_ValidateWakeupEvent
- EcuM_CheckWakeup
- EcuM_DisableWakeupSources
- EcuM_EnableWakeupSources
- EcuM_StartWakeupSources
- EcuM_StopWakeupSources
ECU管理器模块可以管理多达32个唤醒源。唤醒源的状态通常在上面提到的EcuM接口,通过EcuM_WakeupSourceType位掩码表示,其中各个唤醒源对应于固定位位置。有5个预定义位的位置,其余的可以通过配置分配。更多详细信息,可参阅EcuM_WakeupSourceType的定义。
一方面,ECU管理器模块管理每个唤醒源的模式。另一方面,ECU管理器模块通过预先假定存在的内部变量(internal variables),即EcuM_WakeupSourceType的实例,来跟踪哪些唤醒源处于特定状态,特别是NONE(即已清除)、PENDING、VALIDATED和EXPIRED。ECU管理器模块在各自的接口定义中使用这些内部变量来定义接口的语义。因此,这些内部变量是否真的被执行是次要的,它们主要用于解释接口的语义。
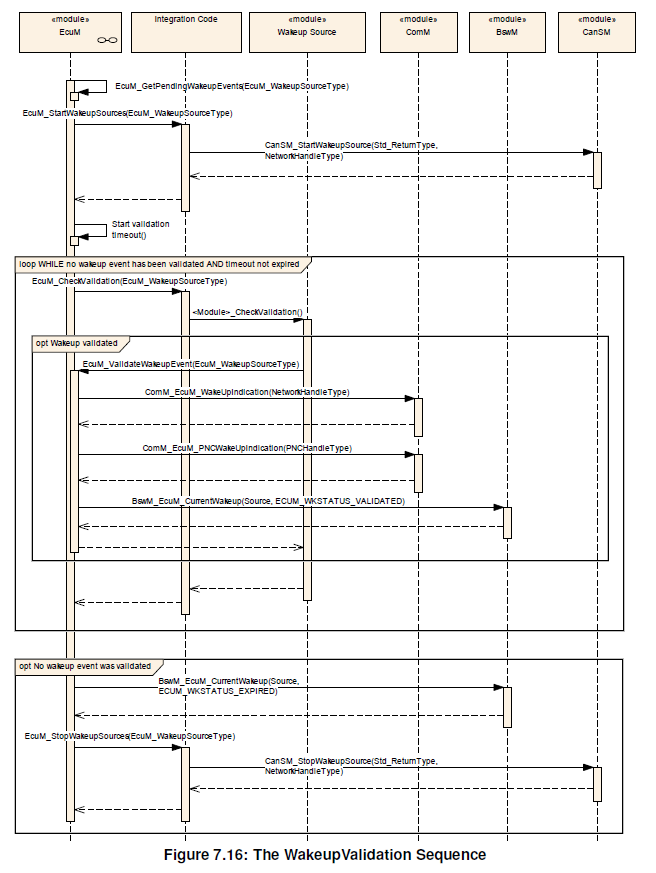
6.6.4. WakeupValidation序列中的活动
由于唤醒事件可能会无意中产生,例如:CAN线路上的EVM尖峰,所以有必要在ECU恢复完全运行之前验证这些唤醒事件。
所有唤醒源的验证机制都是相同的。当唤醒事件发生时,ECU从SLEEP状态唤醒,并在MCU驱动程序的MCU_SetMode服务中恢复执行。当WakeupRestart序列完成时,ECU管理器模块将有一个待验证的唤醒事件列表。接着ECU管理器模块释放BSW调度器和所有BSW MainFunctions。最值得注意的是,在这种情况下EcuM Main Function可以恢复处理。
实现提示:
由于SchM将在StartPostOS和WakeupRestart序列的末尾运行,所以EcuM_MainFunction可能会在验证此唤醒源时,与其相关的软件栈(Stack)还未被初始化。集成商(integrator)应配置适当的模式以指示软件栈不可用,并且相应地禁用EcuM_MainFunction(详情可参见文档[2])。
ECU管理器模块仅需在配置为需要验证的唤醒源上调用唤醒验证。如果未配置验证协议(请参阅EcuMValidationTimeout),则对EcuM_SetWakeupEvent的调用也暗示着对EcuM_ValidateWakeupEvent的调用。
ECU管理器模块需为每个待验证、待定的唤醒事件启动验证超时。超时需特定于事件,请参阅EcuMValidationTimeout。
实现提示:
代码实现中如果只提供一个定时器其实也是足够的。当报告新的唤醒事件时,该定时器会被延长到最长的超时时间。
当待定唤醒事件的验证超时后,EcuM_MainFunction需设置内部到期唤醒事件变量中事件集合的相关bit位。请参见章节6.6.3 唤醒状态的内部表示。同时EcuM_MainFunction需调用BswM_EcuM_Current_Wakeup,并使用EcuM_WakeupSourceType位掩码参数,将对应于唤醒事件集的位和状态值参数设置为ECUM_WKSTATUS_EXPIRED。
BswM需配置为通过EcuM的模式切换请求(mode switch requests)来监视唤醒验证,EcuM负责验证唤醒源或等待计时器的超时。如果最后一次验证,没有通过验证的情况下超时,则BswM需认为唤醒验证失败。如果有任意一个待定唤醒源被验证通过,那么整个验证需视为已通过。
待定的唤醒事件通过调用EcuM_ValidateWakeupEvent进行验证。此调用必须放置在驱动程序中,或者驱动程序顶部的消费堆栈中,如处理程序(the handler)。放置它的最佳位置取决于硬件和软件设计。更多内容请参见章节6.6.4.4 唤醒源的驱动程序的需求。
6.6.4.1. 通信通道的唤醒
如果在通信通道上发生唤醒,相应的总线收发器驱动程序必须通过调用EcuM_SetWakeupEvent函数来通知ECU管理器模块。此通知的要求可参考章节5.2节具有唤醒功能的外设中更多的描述。
ECU管理器模块也需要按照唤醒源和ECU管理器的交互章节中定义,在EcuM_SetWakeupEvent函数被调用时,执行唤醒验证协议(Wakeup Validation Protocol)。详细内容可参见章节6.6.4.2 唤醒源和ECU管理器的交互。
6.6.4.2. 唤醒源和ECU管理器的交互
ECU管理器模块应以相同的方式处理所有唤醒源。当唤醒事件发生时,相应的驱动程序需将唤醒事件通知ECU管理器模块。通知的方式可能包括:
- 当退出暂停或轮询序列后。在这种情况下ECU管理器模块需调用EcuM_AL_DriverRestart来重新初始化相关驱动程序,从而它有机会可以扫描相关的硬件。例如:待定的唤醒中断。
- 如果唤醒源真的处于睡眠模式下,则驱动程序可以通过轮询或等待中断的方式,自主的扫描唤醒事件。
如果唤醒事件需要验证,则ECU管理器模块需调用验证协议(validation protocol)。如果唤醒事件不需要验证,则ECU管理器模块需发出模式切换请求,将事件的模式设置为ECUM_WKSTATUS_VALIDATED。
如果唤醒事件被验证(无论是立即或通过唤醒验证协议),ECU管理器模块应通过调用EcuM_GetValidatedWakeupEvents告知此唤醒事件是当前ECU唤醒的来源。
6.6.4.3. 唤醒验证超时
ECU管理器模块可以选择提供单个的唤醒验证超时定时器,或者为每个唤醒源提供一个定时器。
ECU管理器模块需在EcuM_SetWakeupEvent函数被调用时,启动唤醒验证超时计时器。而EcuM_ValidateWakeupEvent函数需停止唤醒验证超时计时器的计时。
如果接着由于相同的唤醒源被触发,EcuM_SetWakeupEvent被再次调用时,ECU管理器模块无需重启(restart)唤醒验证超时计时器。
如果只使用单个的计时器,则建议采用以下方法。如果在一唤醒周期内,当EcuM_SetWakeupEvent因为一个尚未触发的唤醒源被调用时,则ECU管理器模块需为该唤醒源延长唤醒验证超时计时器。
唤醒超时的时间设定可以通过参数EcuMValidationTimeout进行配置定义。
6.6.4.4. 唤醒源的驱动程序的需求
驱动程序在检测到唤醒事件时,必须调用EcuM_SetWakeupEvent一次。在调用时使用配置参数EcuMWakeupSourceId来作为EcuM_WakeupSourceType的参数,来标识指定的唤醒源。
ECU管理器模块需检测在驱动程序初始化之前发生的唤醒,包括:停止(Halt)、轮询(Poll)或关闭(Off)。
驱动程序需提供一个API实现SLEEP状态下唤醒源的配置,启用或禁用唤醒源,以及使相关外设进入睡眠状态。此需求仅适用于硬件具有提供这些功能能力的情况。
同时,驱动程序需在其初始化函数中,启用回调函数的调用。
EcuMWakeupSource分区分配(partition assignment)需能被所引用的模块配置所识别。
注意:
唤醒源唤醒验证的调用以及唤醒的Callout函数(启动/启用/禁用),应在分配给唤醒源的内核上执行。或者以其他方式,在某个内核的执行上下文中,仅应处理那些分配给该内核分区的唤醒源。
6.6.5. 唤醒验证的需求
如果唤醒源需要验证,这可以由基本软件的一个适当模块完成。它可能是驱动程序、接口、处理程序或管理器。
通过调用EcuM_ValidateWakeupEvent函数来完成验证。
如果EcuM无法确定MCU驱动返回的复位原因,则EcuM为默认唤醒源ECUM_WKSOURCE_RESET设置一个唤醒事件。
6.6.6. 唤醒源和复位原因
ECU管理器模块API仅提供一种类型EcuM_WakeupSourceType,它可以用来描述ECU启动或唤醒的所有原因。
ECU管理器模块永远不会为以下唤醒源调用验证:
- ECUM_WKSOURCE_POWER
- ECUM_WKSOURCE_RESET
- ECUM_WKSOURCE_INTERNAL_RESET
- ECUM_WKSOURCE_INTERNAL_WDG
- ECUM_WKSOURCE_EXTERNAL_WDG
6.6.7. 具有集成功率控制的唤醒源
SLEEP可以通过控制MCU电源的系统芯片来实现。典型的例子是带有集成电源的CAN收发器,可根据应用请求关闭电源,并在CAN活动时打开电源。结果是,对于此类硬件上的ECU管理器模块,SLEEP看起来就像关闭。这种区别是相当哲学的,并不具有实际意义。
实际影响是CAN上的被动唤醒看起来就像ECU上电复位一样。因此ECU将在唤醒事件后继续执行STARTUP序列。尽管如此,唤醒验证是必需的,系统设计人员必须考虑以下主题:
- CAN收发器在某个驱动程序初始化程序块期间初始化(默认情况下在BswM控制下)。这是配置或生成的代码,即受系统设计者控制的代码。
- CAN收发器驱动程序需提供API函数来确定,是否由于CAN收发器而被动唤醒,而启动了ECU。系统设计人员有责任通过调用EcuM_StartCheckWakeup检查潜在唤醒源,防止ECU关闭。并检查CAN收发器的唤醒原因,并使用EcuM_SetWakeupEvent和EcuM_ClearWakeupEvents函数,将此信息传递给ECU管理器模块。
这些原理可以应用于所有具有集成功率控制的唤醒源。CAN收发器仅作为示例。
6.7. 关机目标
关机目标(Shutdown Targets)是对无执行代码的ECU状态的描述性术语。它们被称为关机目标的原因,是它们是离开UP阶段时,状态机将驱动到的目标状态。
关机目标包括以下状态:
- 关机(Off)
- 睡眠(Sleep)
- 复位(Reset)
注意:
可以确定关机目标的时间不一定是关闭的开始。由于BswM现在控制着大多数ECU资源,所以它将确定应该设置关机目标的时间点,并通过直接或间接地方式设置它。因此BswM必须确保在调用EcuM_GoDownHaltPoll之前,将关机目标的默认值更改为ECUM_STATE_SLEEP。
在以前版本的ECU管理器模块中,因为在ECU中实现的睡眠模式取决于ECU的能力,所以睡眠目标需被特殊处理。这些睡眠模式取决于硬件,通常在时钟设置或硬件提供的其他低功耗特性方面有所不同。这些不同的功能可以通过MCU驱动程序,作为所谓的MCU模式访问(可参见文档[11])。
同时还有多种复位执行的方式,这些方式通过不同的模块控制或触发:
- 通过调用Mcu_PerformReset函数
- 通过调用WdgM_PerformReset函数
- 通过DIO或者SPI切换I/O引脚的方式
ECU管理器模块提供了一种工具来管理这些复位方式(reset modalities),方法是跟踪以前复位的时间和原因。不同的复位方式(reset modalities)将被视为不同的复位模式(reset modes),使用与睡眠相同的模式设施。
6.7.1. Sleep
在SLEEP阶段,任何唤醒事件都不应该被错过。如果在Go Sleep序列中发生了唤醒事件,则不应进入Halt或者Poll序列。
ECU管理器模块可以定义一组可配置的睡眠模式(具体请参阅EcuMSleepMode),其中每个模式本身都是关机目标。ECU管理器模块需允许将MCU睡眠模式映射到ECU的睡眠模式,并允许将它们作为关机目标来处理。已Sleep作为关机目标,需将使所有的内核(cores)都进入睡眠状态。
6.7.2. Reset
ECU管理器模块需定义一组可配置的复位模式(具体可参见:EcuMResetMode和EcuM_ResetType),其中每种模式本身都是一个关机目标。该集合将至少包含以下几个目标:
- ECUM_RESET_MCU: 通过调用MCU_PerformReset
- ECUM_RESET_WDG: 通过调用WdgM_PerformReset
- ECUM_RESET_IO: 通过DIO/SPI切换I/O引脚的方式
ECU管理器模块需允许为复位目标定义别名(参见:EcuM180_Conf)。
ECU管理器模块需定义一组可配置的复位原因(参见:EcuMShutdownCause和EcuM_ShutdownCauseType)。该集合应至少包含以下目标:
- ECUM_CAUSE_ECU_STATE:ECU状态机进入关机状态
- ECUM_CAUSE_WDGM:WdgM检测到故障
- ECUM_CAUSE_DCM: DCM请求关闭
以及重置的时间。
ECU管理器模块应为BSW模块和SW-C提供设施已完成以下功能:
- 记录关机原因
- 获取一组最近的关机原因
6.8. 闹钟
ECU管理器模块可以提供可选的持久化地时钟服务。此服务即使在睡眠期间,也能保持活动(active)状态。 因此,它能保证ECU在未来的某个时间被唤醒(假设硬件没有任何故障),并为长期活动提供时钟服务,支持可以小时、天、甚至年为单位地时间区间。
通常该服务将通过ECU中的定时器来实现,该定时器可以触发唤醒。但是,在某些情况下,外部设备也可以使用常规中断线来定期唤醒ECU。无论使用何种机制,服务都会私下使用一个唤醒源。
ECU管理器模块维护一个主闹钟,其值决定了ECU将被唤醒的时间。此外ECU管理器管理一个内部时钟,即EcuM时钟,用于与主闹钟进行比较。
注意:
闹钟唤醒机制仅与SLEEP阶段相关。SW-C和BSW模块可以在UP阶段(并且仅在UP阶段)设置和检索闹钟设定值,但是最终在SLEEP阶段被使用。
与其他计时/唤醒机制相比,可以使用通用ECU管理器模块设施来实现,闹钟服务在计时器到期之前并不会启动WakeupRestart序列。当时钟时间已超过警报时间,ECU模块检测到计时器已触发唤醒事件时,它会增加其计时器,接着返回睡眠状态。
当闹钟服务存在时(参见:EcuMAlarmClockPresent),EcuM管理器模块需维护一个EcuM时钟,其时间应为电池连接后的秒数。
EcuM时钟应在UP和SLEEP阶段跟踪时间。在硬件允许的情况下,ECU时钟时间不应由于ECU的复位而被重置。
系统应该有且只有一个唤醒源分配给了EcuM时钟(详见参见:EcuMAlarmWakeupSource)。
6.8.1. 闹钟和用户
SW-C和BSW模块可以各自维护一个用户闹钟(user alarm clock)。每个用户闹钟(请参阅:EcuMAlarmClock)都与一个EcuMAlarmClockUser相关联,该EcuMAlarmClockUser用来标识相应的SW-C或BSW模块。
每个EcuM用户最多拥有一个用户闹钟。EcuM用户不得设置其他用户的闹钟值。
ECU管理器模块需始终将主闹钟值设置为最早的用户闹钟值。这也意味着,当EcuM用户发起中止其用户闹钟时,此用户闹钟会决定当前主闹钟值值,ECU管理器模块需将主闹钟值设置为下一个最早的用户闹钟值。
只有授权的EcuM用户才能设置EcuM时钟时间(请参阅:EcuMSetClockAllowedUsers)。
逻辑依据:
通常EcuM用户不允许设置EcuM时钟时间。EcuM时钟时间可以被设置为任意时间,以允许测试需要数天才能到期的闹钟。
6.8.2. EcuM时钟时间
如果底层硬件机制是基于Tick方式的,EcuM需相应地校正时间。
6.8.2.1. UP阶段的EcuM时钟时间
EcuM_MainFunction在UP阶段需累加EcuM时钟数。它使用标准的操作系统机制(闹钟/计数器)来推导它的时间。但必须注意计数器和EcuM时间的粒度不同,EcuM时间是以秒为单位。
6.8.2.2. SLEEP阶段的EcuM时钟时间
根据选择的睡眠模式(参数:EcuMSleepModeSuspend ),有两种方法可以在睡眠期间累加EcuM时钟数。
在停止序列中(请参阅: 6.5.2 停止序列中的活动),GPT驱动程序必须放在GPT_MODE_SLEEP中,以便只配置那些时间基数所需的计时器通道。它还需要GPT使用Gpt_EnableWakeup API来启用基于定时器的唤醒通道。最好将Gpt_StartTimer API设置为1秒。但如果无法设置此数值,则EcuM将需要更频繁地唤醒,以积累多个定时器唤醒,只有在时间累计1秒后,时钟才能增加1。
在轮询序列中(请参阅: 6.5.3 轮询序列中的活动),EcuM的时钟可以在EcuM_SleepActivity函数被调用期间,使用EcuM_SetClock函数定期更新。假设时间概念仍然可用。只有在时间累计1秒后,时钟才能增加1。
在睡眠期间,累加EcuM时钟数的两种情况下,ECU管理器模块必须评估主闹钟是否已超时。如果是这样,BswM将发起完全启动(full startup)或者再次将ECU设置为睡眠状态。
离开睡眠状态时,ECU管理器模块将中止任何活动的用户闹钟和主闹钟。这意味着时钟触发的和其他事件引起的唤醒,都将导致清除所有闹钟。
在StartPreOS序列、WakeupRestart序列和OffPreOS序列中,用户闹钟和主闹钟需被取消。
6.9. MultiCore
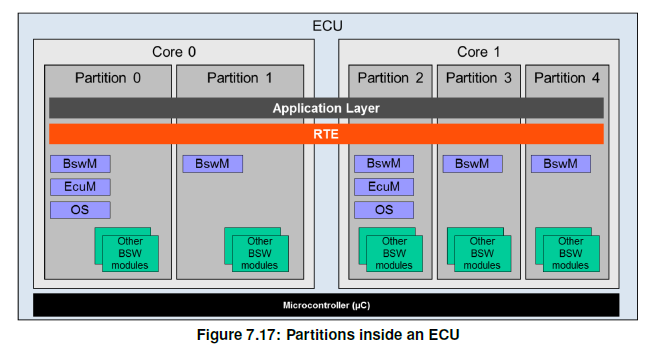
本章节介绍了BSW模块在不同分区上(partition)的分布。分区(partition)可以被看作是映射在一个内核(core)上的独立部分。所以每个核(无论是单核架构还是多核架构)都至少包含一个,但也可以包含任意多个分区。但是任何分区都不能跨越一个以上的内核。
BSW模块可以分布在不同的分区上,所以可以分布在不同的内核上。如BswM这类的一些BSW模块需包含在每个分区中。如OS或EcuM这类的一些其他模块需包含在每个内核的一个分区中。具体示例请参考下图。
在多核架构中,EcuM必须以某种方式分布,即:每个核存在一个实例。
一个用来引导加载程序(boot loader)指定的主内核通过EcuM_Init启动主EcuM(master EcuM)。 主EcuM负责启动一些驱动程序,确定Post Build配置,接着启动其他的内核及其所附属EcuM(Satellite EcuMs)。
每个EcuM现在启动内核的本地操作系统和内核的本地BswM(在每个分区中驻留一个BswM)。
如果在ECU的每个内核上执行相同的EcuM映像,则ECU管理器的行为必须在不同内核上有所不同。这可以由ECU管理器通过测试,确认它是在主内核还是从内核上,并采取适当的行动来完成。
ECU管理器模块在多核ECU上支持与传统ECU上相同的阶段(即:STARTUP、UP、SHUTDOWN和SLEEP)。
如果使用安全机制,ECU管理器模块必须以完全信任级别运行。
本章节使用了前面的ECU管理器术语来表示各种ECU状态,特别是Run / PostRun。通过灵活的ECU管理,系统集成商可以决定ECU的状态名称和语义。但是必须坚持确保去初始化阶段的方法。 所以这里使用的名称是不规范的。
6.9.1. 主内核
主内核(Master Core)具体是哪个内核?它是由引导加载程序(boot loader)决定。主内核的EcuM作为第一个BSW模块启动,并执行初始化操作。接着才是通过其他EcuM模块,启动剩下的其他内核。
当所有内核都启动完成时,主内核会与每个附属EcuM(Satellite EcuM)一起初始化自身内核的本地OS和BswM模块。
6.9.2. 从内核
在每个从内核(Slave core)上,必须运行一个附属的EcuM。如果一个内核包含了多个分区,每个内核也只需要一个EcuM即可。
6.9.3. 主从内核信号处理
本节描述了BSW内核通信的一般机制。它以RTE中描述和指定的SchM的一般知识为前提。
6.9.3.1. BSW级别
操作系统提供了一种基本机制,用于同步主从内核上的操作系统启动。调度程序管理器(Scheduler Manager)为BSW模块跨分区边界(Partition Boundaries)的通信提供了基本机制。每个内核有一个BSW模式管理器负责启动和停止RTE。
关于解决方案的更完整的描述,以及在不同的方案之间进行选择时的注意事项及讨论,可参阅模式管理指南(Guide to Mode Management)[23]。
6.9.3.2. 关机同步示例
在调用ShutdownAllCores之前,主ECU管理器模块需完成以下步骤:
- 启动所有从ECU管理器模块的关机请求,
- 必须等到所有模块都去初始化它们负责的BSW模块并成功关机动作。
主ECU管理器模块设置了一个可以被所有从模块读取的关机标志。EcuM为每个已配置的从内核激活随后的任务。从模块在其主程序中读取标志信息,并在请求时进行关机操作。任务(Task)的名称为EcuM_SlaveCore<X>_Task,其中X是一个数字。该任务需要由集成商(integrator)配置。由于主内核使用了一个EcuMFlexPartionRef,所以需要激活的任务数可以通过将EcuMPartitionRef的实例数减一进行计算。
示例:
首先先配置了三个EcuMPartitionRef实例,然后在调用EcuM_GoDownHaltPoll期间,将启动EcuM_SlaveCore1_Task和EcuM_SlaveCore2_Task。从模块在主程序(main routine)内读取的标志并在请求时关闭。
操作系统扩展了OSEK SetEvent的跨内核功能。一个内核上的任务(Task)可以等待另一个内核上的事件集(Event Set)。图7-18说明了如何应用在调用ShutdownAllCores之前的内核同步的问题(其中去初始化的详细信息被省略)。Set/WaitEvent函数接受一个位掩码(bitmask),该位掩码可用于指示各个从内核上的关闭就绪状态。来自从ECU管理器模块的每个SetEvent调用都将停止主ECU管理器模块的等待。所以主ECU管理器模块必须跟踪各个从内核的状态并设置等待,直到所有内核都注册已就绪。
如果调用者已经获取了资源(resource)或自旋锁(spinlock),则可以用GetEvent循环替换WaitEvent函数。
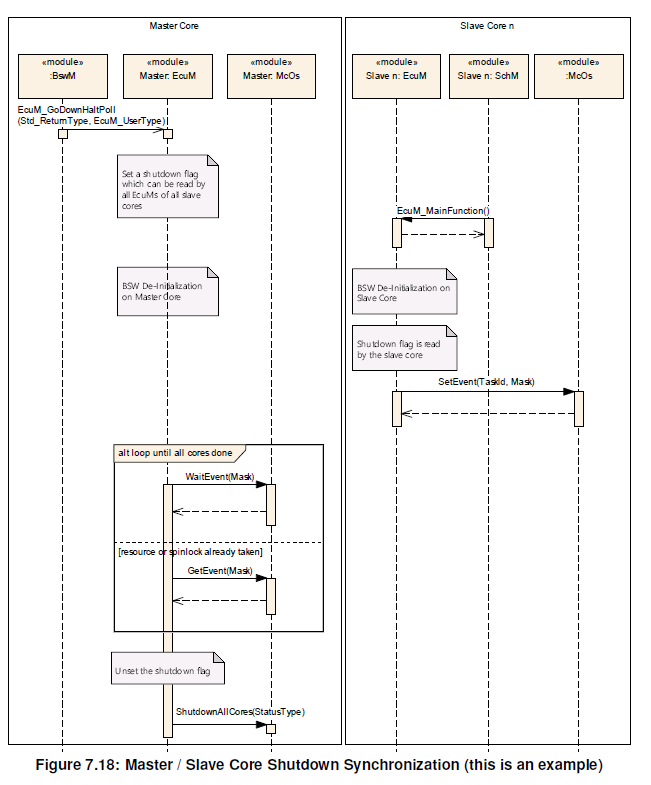
注意:
图7-18是主内核上的逻辑控制流示例。EcuM_GoDownHaltPoll API需要EcuM在每个内核上都提供。从内核上此函数的行为是需要特定实现的。
集成说明:
如果主从核之间的同步是通过SetEvent/WaitEvent的方式实现的,那么EcuM_GoDownHaltPoll将被BswM模块在其主函数任务的上下文中调用(模式仲裁需延迟处理)。这还需要主函数任务(the main function task)必须是扩展任务(extended task)。
6.9.4. UP阶段
从硬件的角度来看,唤醒中断可能发生在所有内核上。整个ECU会被唤醒,接着在此内核上运行的EcuM处理唤醒事件。所以EcuM_MainFunction需在所有EcuM实例中运行。ECU管理器模块的每个实例都应不能处理其负责内核的唤醒事件。
与单核情况一样,BswM模块负责控制ECU资源,确定本地内核可以断电或停止,以及在移交控制给内核的EcuM之前,对相关的应用程序和BSW进行去初始化操作。
6.9.5. STARTUP阶段
ECU管理器模块的功能在所有内核上几乎相同。也就是说对于单核情况,ECU管理器模块为Startup阶段执行指定的步骤。最重要的就是启动操作系统(Starting the OS),初始化SchM(Initializing the SchM)并启动本地内核的BswM模块。
主EcuM在调用InitBlock 1以及执行重置(Reset)/唤醒(Wakeup)内务后,会激活所有从内核。从内核在被激活后,开始执行它的启动例程,在在其内核上调用EcuM_Init。
如果EcuMEcucCoreDefinitionRef未配置,则初始化调用只会在主核上执行。
注意:
如果您需要在多个内核上初始化一个模块,您必须将此模块添加到每个内核的特定的初始化列表中。同时也必须意识到,在这种情况下,可能存在从不同的内核并行调用init函数的情况,所以init函数需被定义为不可重入的。
在每个EcuM在其内核上调用StartOs后,操作系统会在运行内核单独启动挂钩(core-individual startup hook)之前同步内核,并在开始运行每个内核上的第一个任务(Task)之前再次同步一下内核。
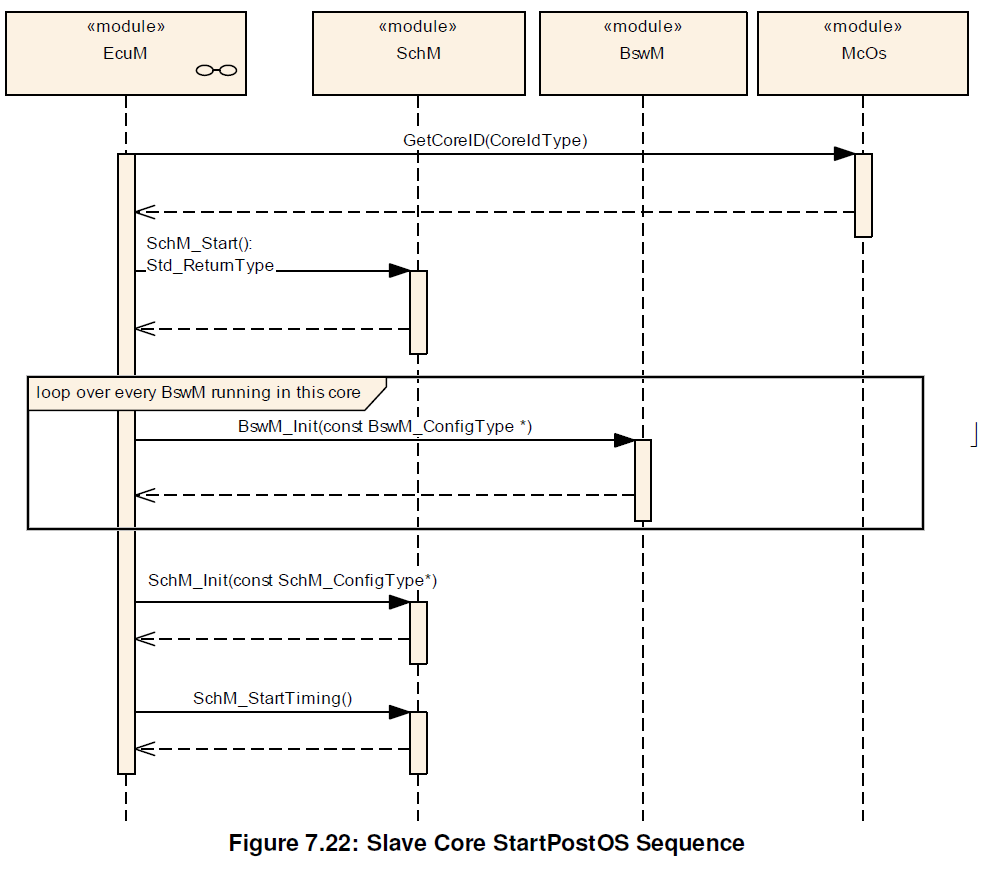
StartPostOS会在每个内核上都执行,并且在每个内核上初始化SchM。所有内核上的本地BswM模块都会由每个EcuM初始化。接着每个分区(Partition)上的每个BswM会启动该内核上的RTE。
ECU管理器模块需在每个内核上启动SchM和OS。同时ECU管理器模块也需为主内核和所有从内核上的所有内核本地的BswM模块调用BswM_Init函数。
6.9.5.1. 主内核STARTUP
- 主内核StartPreOS序列
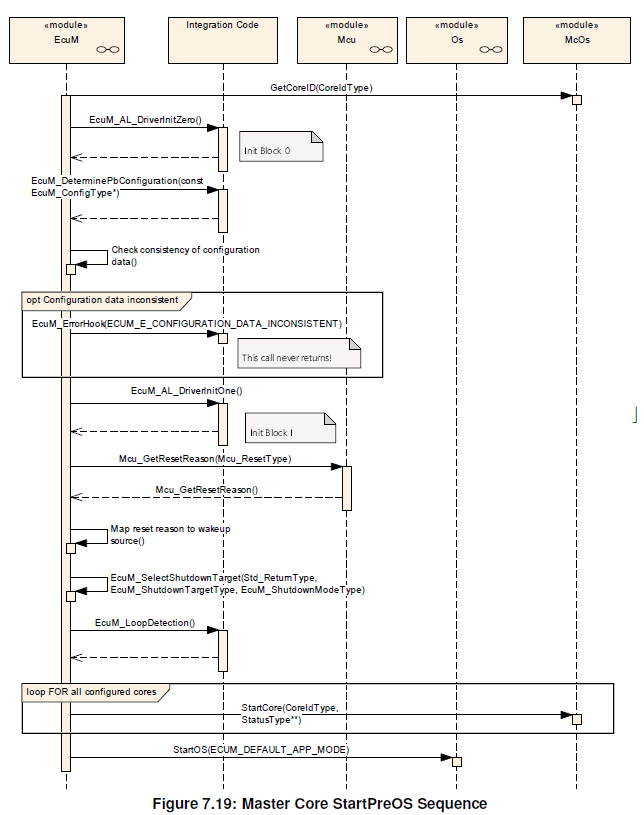
- 主内核StartPostOS序列
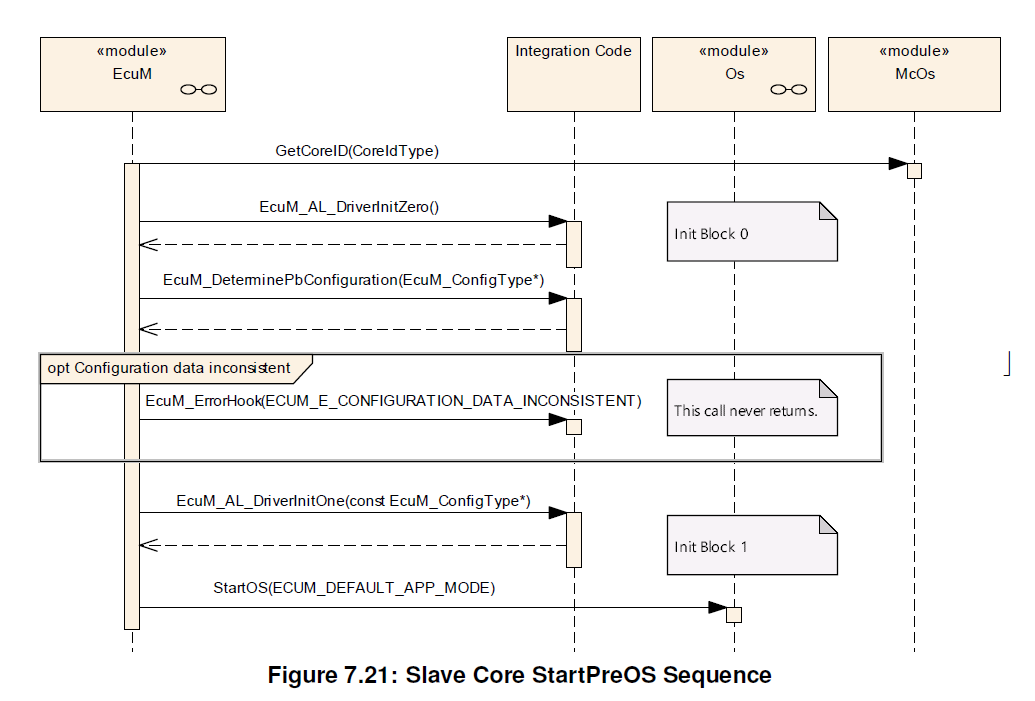
6.9.5.2. 从内核STARTUP
EcuM的EcuM_AL_DriverInitZero和EcuM_AL_DriverInitOne函数需由每个内核上的EcuM_Init函数调用。这些Callout函数的实现需确保只有那些在当前活动内核上运行的MCAL模块被初始化。
- 从内核StartPreOS序列
- 从内核StartPostOS序列
6.9.6. SHUTDOWN阶段
当前独立单个内核的关闭是不支持的(即:ECU的部分继续运行时)。所有内核必须同时被关闭。
当ECU需被关闭时,主ECU管理器模块调用ShutdownAllCores,而不是以某种方式在各个内核上调用ShutdownOS。ShutdownAllCores会停止所有内核上的操作系统,并且停止所有内核运行。
由于主内核可以在所有从内核完成处理之前发出ShutdownAllCores,所以在进入SHUTDOWN之前必须对这些内核进行同步。
分布在所有分区上的BswM确定ECU应该被关闭,并与ECU中的每个BwsM进行同步。所有BswM模块会对所有分区上的BSW、SW-C和CDD进行去初始化,并向其他BswM发送适当的信号以指示它们已准备好关机。
对于ECU的关闭,BswM(位于主EcuM的同一分区中)最终在主内核上调用GoOff,该主内核会将该请求分发给所有从内核。主ECU管理器模块会对BswM和SchM进行去初始化。从内核上的EcuM会负责去初始化它们的SchM和BswM,并检查在关机期间没有发生任何唤醒事件,接着发送一个信号以指示本内核已为ShutdownOS做好准备。具体请参阅章节6.9.3主从内核发信号处理
主EcuM等待来自每个从内核EcuM的信号,然后像以往一样在主内核上启动关闭流程。主EcuM调用ShutdownAllCores,并且使用全局关闭钩子(Global shutdown hook)最终实现ECU关机。
6.9.6.1. 主内核SHUTDOWN
- 主内核OffPreOS序列
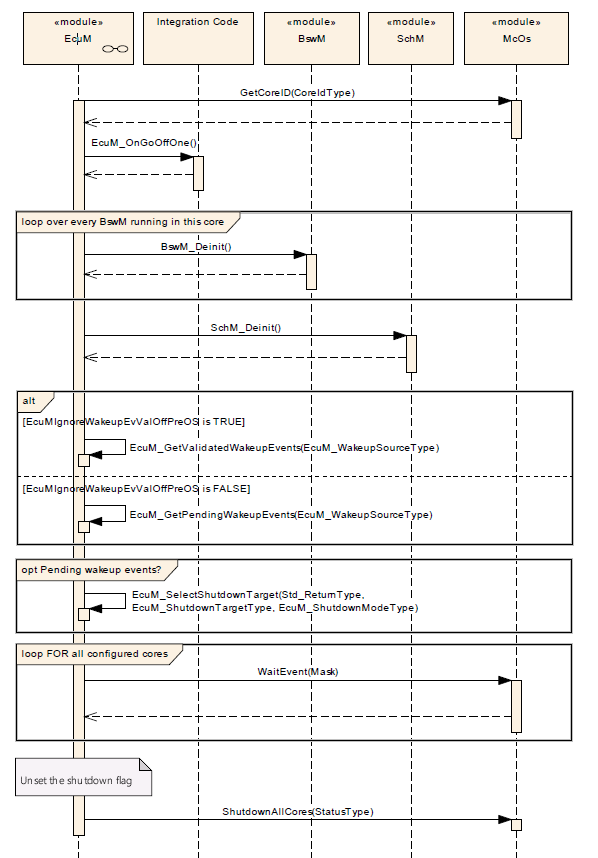
- 主内核OffPostOS序列
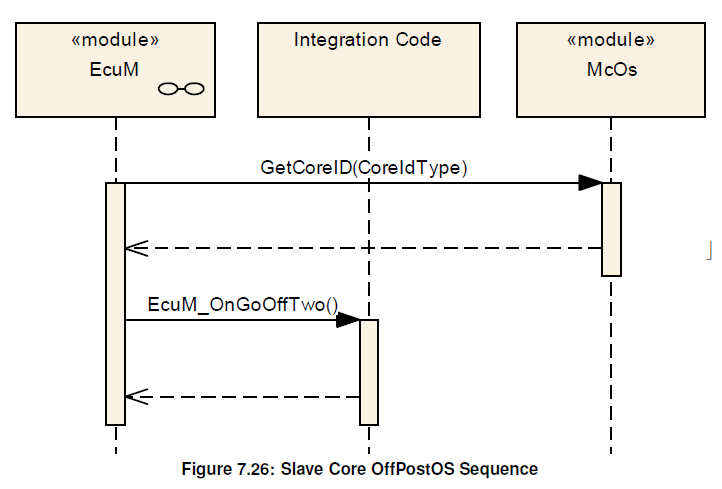
6.9.6.2. 从内核SHUTDOWN
- 从内核OffPreOS序列
- 从内核OffPostOS序列
6.9.7. SLEEP阶段
当请求的关机目标是睡眠(Sleep)时,所有内核需同时进入睡眠状态。MCU必须为每个内核发出停止(Halt)指令。因为对于OS中的内核来说,任务的时序(Task Timing)和优先级属于本地局部的(local),所以调度程序(scheduler)和RTE在停止后都不必同步。 因为主内核可以在所有从内核完成处理之前,发出MCU停止指令,所以在进入GoHalt之前,必须对所有从内核进行同步。
BswM需确定睡眠应该被启动,并将相应的ECU模式分配给每个内核。在从内核上的BSW、SW-C和CDD必须由其分区上本地的BswM负责通知,同时相应地去初始化,并向BswM发送相应的模式请求,以表明已准备就绪。
如果ECU进入睡眠状态,则停止(Halt)指令必须同步,以便在主内核计算校验和之前停止所有从内核。主内核上的ECU管理器模块使用与在Go Off时相同的同步内核信号机制。
类似,主内核上的ECU管理器模块必须在释放从内核停止状态(Halt State)之前验证计算的校验和值。
6.9.7.1. 主内核SLEEP
- 主内核GoSleep序列
- 主内核Halt序列
- 主内核Poll序列
- 主内核WakeupRestart序列
6.9.7.2. 从内核SLEEP
- 从内核GoSleep序列
- 从内核Halt序列
- 从内核Poll序列
- 从内核WakeupRestart序列
6.9.8. 可运行实体和入口点
6.9.8.1. 内部行为
ECU Manager模块的内部行为定义如下。此详细说明仅在本地RTE的配置时需要。
InternalBehavior EcuStateManager {
// Runnable entities of the EcuStateManager
RunnableEntity SelectShutdownTarget
symbol "EcuM_SelectShutdownTarget"
canbeInvokedConcurrently = TRUE
RunnableEntity GetShutdownTarget=
symbol "EcuM_GetShutdownTarget"
canbeInvokedConcurrently = TRUE
RunnableEntity GetLastShutdownTarget
symbol "EcuM_GetLastShutdownTarget"
canbeInvokedConcurrently = TRUE
RunnableEntity SelectShutdownCause
symbol "EcuM_SelectShutdownCause"
canbeInvokedConcurrently = TRUE
RunnableEntity GetShutdownCause
symbol "EcuM_GetShutdownCause"
canbeInvokedConcurrently = TRUE
RunnableEntity SelectBootTarget
symbol "EcuM_SelectBootTarget"
canbeInvokedConcurrently = TRUE
RunnableEntity GetBootTarget
symbol "EcuM_GetBootTarget"
canbeInvokedConcurrently = TRUE
RunnableEntity SetRelWakeupAlarm
symbol "EcuM_SetRelWakeupAlarm"
canbeInvokedConcurrently = TRUE
RunnableEntity SetAbsWakeupAlarm
symbol "EcuM_SetAbsWakeupAlarm"
canbeInvokedConcurrently = TRUE
RunnableEntity AbortWakeupAlarm
symbol "EcuM_AbortWakeupAlarm"
canbeInvokedConcurrently = TRUE
RunnableEntity GetCurrentTime
symbol "EcuM_GetCurrentTime"
canbeInvokedConcurrently = TRUE
RunnableEntity GetWakeupTime
symbol "EcuM_GetWakeupTime"
canbeInvokedConcurrently = TRUE
RunnableEntity SetClock
symbol "EcuM_SetClock"
canbeInvokedConcurrently = TRUE
RunnableEntity RequestRUN
symbol "EcuM_RequestRUN"
canbeInvokedConcurrently = TRUE
RunnableEntity ReleaseRUN
symbol "EcuM_ReleaseRUN"
canbeInvokedConcurrently = TRUE
RunnableEntity RequestPOSTRUN
symbol "EcuM_RequestPOST_RUN"
canbeInvokedConcurrently = TRUE
RunnableEntity ReleasePOSTRUN
symbol "EcuM_ReleasePOST_RUN"
canbeInvokedConcurrently = TRUE
// Port present for each user. There are NU users
SR000.RequestRUN -> RequestRUN
SR000.ReleaseRUN -> ReleaseRUN
SR000.RequestPOSTRUN -> RequestPOSTRUN
SR000.ReleasePOSTRUN -> RequestPOSTRUN
PortArgument {port=SR000, value.type=EcuM_UserType,
value.value=EcuMUser[0].User }
(...)
SRnnn.RequestRUN -> RequestRUN
SRnnn.ReleaseRUN -> ReleaseRUN
SRnnn.RequestPOSTRUN -> RequestPOSTRUN
SRnnn.ReleasePOSTRUN -> RequestPOSTRUN
PortArgument {port=SRnnn, value.type=EcuM_UserType,
value.value=EcuMUser[nnn].User }
shutDownTarget.SelectShutdownTarget -> SelectShutdownTarget
shutDownTarget.GetShutdownTarget -> GetShutdownTarget
shutDownTarget.GetLastShutdownTarget -> GetLastShutdownTarget
shutDownTarget.SelectShutdownCause -> SelectShutdownCause
shutDownTarget.GetShutdownCause -> GetShutdownCause
bootTarget.SelectBootTarget -> SelectBootTarget
bootTarget.GetBootTarget -> GetBootTarget
alarmClock.SetRelWakeupAlarm-> SetRelWakeupAlarm
alarmClock.SetAbsWakeupAlarm -> SetAbsWakeupAlarm
alarmClock.AbortWakeupAlarm -> AbortWakeupAlarm
alarmClock.GetCurrentTime -> GetCurrentTime
alarmClock.GetWakeupTime -> GetWakeupTime
alarmClock.SetClock -> SetClock
};
6.10. EcuM模式处理
ECU状态管理器为SW-C提供接口以请求和释放RUN模式和可选的POST_RUN模式。
EcuMFlex对SW-C发出的请求和释放进行仲裁,并将结果传送给BswM。因为只有BswM可以决定何时可以转换到不同的模式,所以EcuM和BswM之间的合作是必需的。由于EcuM没有自己的状态机,EcuM依赖于BswM进行的状态转换,所以EcuM不请求状态。 此外EcuM将当前请求的仲裁通知BswM。当RTE执行完所有属于某个模式的Runnable时会通知BswM模块。
6.10.1. ECU模式处理的架构组件
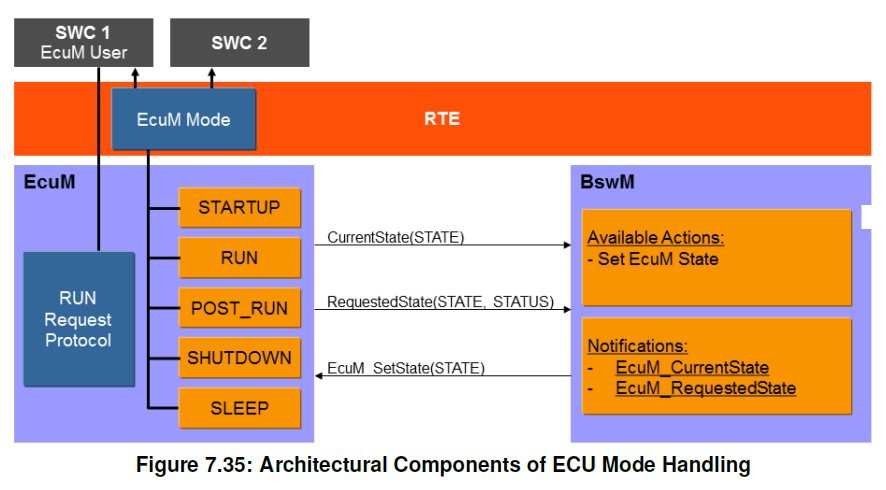
图7-35说明了ECU模式处理的架构组件。
当EcuMModeHandling配置为true时,ECU模式处理需被使能。
当BswM通过EcuM_SetState设置了EcuM的状态时,EcuM需向RTE通知相应的模式变化。
当最后一个RUN请求已被释放时,ECU状态管理器模块应使用BswM_EcuM_RequestedState(ECUM_STATE_RUN, ECUM_RUNSTATUS_RELEASED)接口通知BswM模块。
如果SW-C在POST_RUN期间需要运行活动(例如:关机准备等),它必须在释放RUN请求之前,请求POST_RUN。否则,不能保证此SW-C有机会运行其 POST_RUN的代码。POST_RUN的状态为SW-C 提供了post run阶段,允许SW-C保存重要数据或者关闭相关外围设备。
当ECU状态管理器模块不处于SW-C请求的状态时,ECU状态管理器需使用BswM_EcuM_RequestedState接口通知BswM有关请求的状态。
当接收到第一个RUN或者POST_RUN请求时,ECU状态管理器模块需调用BswM_EcuM_RequestedState(ECUM_STATE_RUN, ECUM_RUNSTATUS_REQUESTED)接口通知BswM。
当最后一个POST_RUN请求也已经被释放时,ECU状态管理器模块需调用BswM_EcuM_RequestedState(ECUM_STATE_POST_RUN, ECUM_RUNSTATUS_RELEASED)接口通知BswM。
提示:
为防止ECU Mode的模式状态机实例滞后,以及EcuM和RTE状态不一致,EcuM可以使用确认反馈(acknowledgement feedback)来进行模式切换通知。
注意:
EcuM仅在RUN和POST_RUN切换时请求模式,SLEEP模式必须由BswM设置,因为EcuM没有关于何时可以进入此模式的信息。
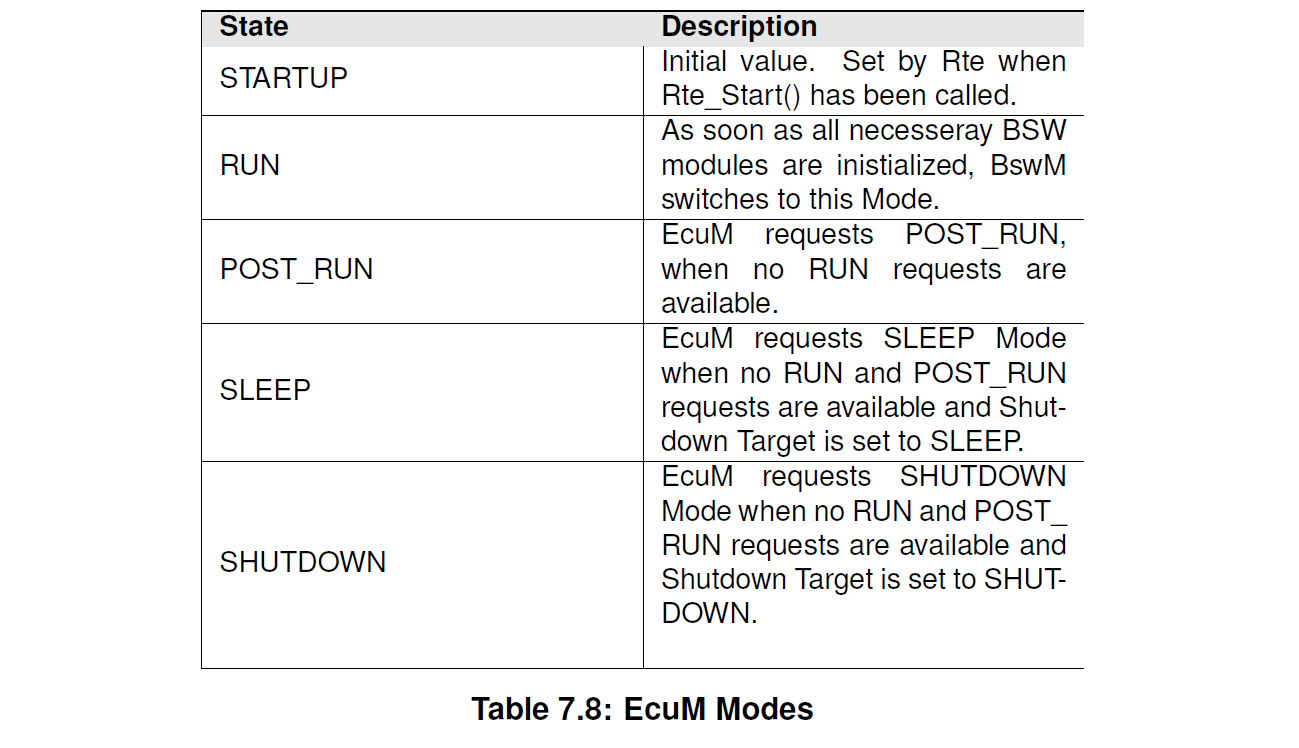
| 状态 | 描述 |
|---|---|
| STARTUP | 初始值。在调用Rte_Start时由Rte设置。 |
| RUN | 当所有需要的BSW模块被初始化,BswM就会切换到此模式。 |
| POST_RUN | 当没有RUN请求存在时,EcuM请求POST_RUN。 |
| SLEEP | 当没有RUN和POST_RUN请求存在,且关机目标设置为SLEEP时,EcuM请求SLEEP模式。 |
| SHUTDOWN | 当没有RUN和POST_RUN请求存在,且关机目标设置为SHUTDOWN时,EcuM请求SHUTDOWN模式。 |
EcuM需通过调用接口BswM_EcuM_CurrentState(EcuM_StateType State)通知BswM当前状态。当RTE通过确认端口给出反馈时,EcuM将设置一个新的状态。
6.11. 高级主题
6.11.1. 与引导加载程序相关
引导加载程序(bootloader)不是AUTOSAR的一部分。尽管如此应用程序仍需要一个接口来激活引导加载程序(bootloader)。 为此ECU状态管理器模块提供了两个函数:
- EcuM_SelectBootTarget
- EcuM_GetBootTarget
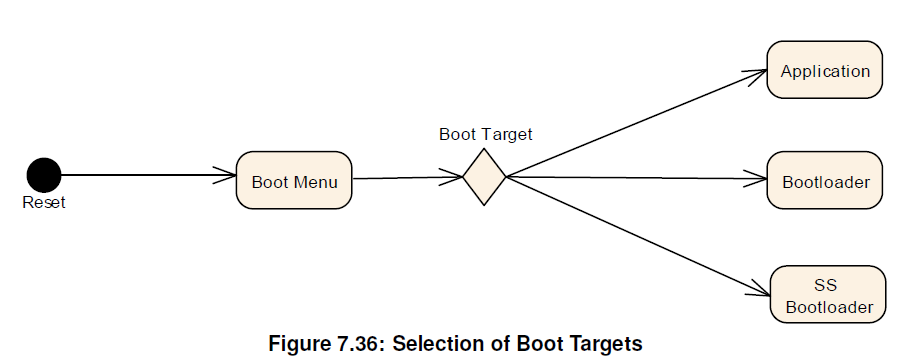
引导加载程序(Bootloader)、系统供应商的引导加载程序(system supplier bootloader)和应用程序(application)是三个独立的程序映像(Image),在许多情况下甚至可以单独刷新。从一个映像切换到另一个映像的唯一方法是通过重启(reset)。 引导菜单(Boot menu)将根据所选引导目标跳转到一个或其它的映像。
6.11.2. 与复杂驱动相关
如果一个复杂驱动程序处理一个唤醒源,它必须遵循本文档中指定的处理唤醒事件的协议。
6.11.3. 处理启动和关闭期间的错误
ECU管理器模块需忽略初始化期间发生的所有类型的错误。例如:初始化函数返回的值。
因为初始化是一个配置问题(参见:EcuMDriverInitListZero、EcuMDriverInitListOne和EcuMDriverRestartList),所以无法标准化。
BSW模块负责将其初始化期间发生的错误,直接报告给DEM模块或DET模块,如其 SWS 中所指定的那样。ECU管理器模块不报告错误。BSW模块还负责采取任何特殊措施来应对初始化期间发生的错误。
6.12. 错误处理
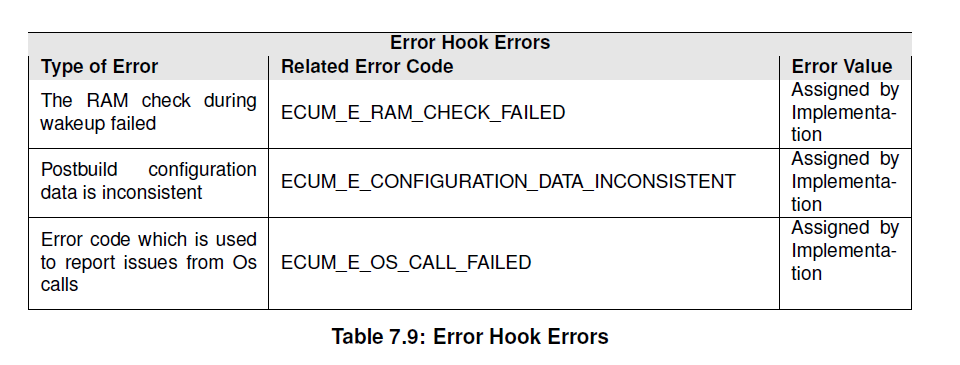
在表7.9第一列中定义的不可恢复错误情况下,ECU管理器模块应调用EcuM_ErrorHook的Callout函数,并将参数值设置为相应的相关错误代码。
| 错误类型 | 相关错误代码 | 错误值 |
|---|---|---|
| 唤醒期间的RAM检查失败 | ECUM_E_RAM_CHECK_FAILED | 由实现分配 |
| Postbuild配置数据不一致 | ECUM_E_CONFIGURATION_DATA_INCONSISTENT | 由实现分配 |
| 用于报告操作系统调用问题的错误代码 | ECUM_E_OS_CALL_FAILED | 由实现分配 |
EcuM需假定EcuM_ErrorHook不会返回(集成商的代码)。
如果需要Dem错误,集成商有责任定义处理它的策略(例如:由于EcuM不直接调用Dem,所以在重启恢复后设置Dem错误)。
如果OS函数调用返回错误代码(E_OK除外),则EcuM应调用EcuM_ErrorHook,错误代码为ECUM_E_OS_CALL_FAILED。
7. API规范
7.1. 函数定义
7.1.1. 通用
7.1.1.1. EcuM_GetVersionInfo
说明: 返回此模块的版本信息。
void EcuM_GetVersionInfo (
Std_VersionInfoType* versioninfo
)
7.1.2. 初始化和关机序列
7.1.2.1. EcuM_GoDownHaltPoll
说明: 根据先前选择的关闭目标,指示ECU状态管理器模块进入睡眠、重启或关闭模式。
Std_ReturnType EcuM_GoDownHaltPoll (
EcuM_UserType UserID
)
7.1.2.2. EcuM_Init
说明: 初始化ECU状态管理器并执行启动程序。该函数永远不会返回(它调用StartOS)。
void EcuM_Init (
void
)
7.1.2.3. EcuM_StartupTwo
说明: 该函数实现了STARTUP II状态。
void EcuM_StartupTwo (
void
)
7.1.2.4. EcuM_Shutdown
说明: 通常有关机挂钩(shutdown hook)调用,此函数接管执行控制并将执行GO OFF II活动。
void EcuM_Shutdown (
void
)
7.1.3. 状态管理
7.1.3.1. EcuM_SetState
说明: BswM 调用的函数,用于通知状态切换。
void EcuM_SetState (
EcuM_StateType state
)
7.1.3.2. EcuM_RequestRUN
说明: 请求RUN状态。每个用户都可以在配置时向状态管理器发出请求。
Std_ReturnType EcuM_RequestRUN (
EcuM_UserType user
)
7.1.3.3. EcuM_ReleaseRUN
说明: 释放先前通过调用EcuM_RequestRUN完成的RUN请求。该服务旨在实现AUTOSAR端口。
Std_ReturnType EcuM_ReleaseRUN (
EcuM_UserType user
)
7.1.3.4. EcuM_RequestPOST_RUN
说明: 发出对POST RUN状态的请求。每个用户都可以在配置时向状态管理器发出请求。RUN和POST RUN的请求必须独立跟踪(换句话说:两个独立变量)。 该服务旨在实现AUTOSAR端口。
Std_ReturnType EcuM_RequestPOST_RUN (
EcuM_UserType user
)
7.1.3.5. EcuM_ReleasePOST_RUN
说明: 释放先前通过调用EcuM_RequestPOST_RUN完成的POST RUN请求。该服务旨在实现AUTOSAR端口。
Std_ReturnType EcuM_ReleasePOST_RUN (
EcuM_UserType user
)
7.1.4. 关机管理
7.1.4.1. EcuM_SelectShutdownTarget
说明: EcuM_SelectShutdownTarget选择关机目标。EcuM_SelectShutdownTarget是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_SelectShutdownTarget (
EcuM_ShutdownTargetType shutdownTarget,
EcuM_ShutdownModeType shutdownMode
)
7.1.4.2. EcuM_GetShutdownTarget
说明: EcuM_GetShutdownTarget返回由EcuM_SelectShutdownTarget设置的当前选择的关闭目标。EcuM_GetShutdownTarget是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_GetShutdownTarget (
EcuM_ShutdownTargetType* shutdownTarget,
EcuM_ShutdownModeType* shutdownMode
)
7.1.4.3. EcuM_GetLastShutdownTarget
说明: EcuM_GetLastShutdownTarget返回上一个关机进程的关机目标。EcuM_GetLastShutdownTarget是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_GetLastShutdownTarget (
EcuM_ShutdownTargetType* shutdownTarget,
EcuM_ShutdownModeType* shutdownMode
)
7.1.4.4. EcuM_SelectShutdownCause
说明: EcuM_SelectShutdownCause选择关机的原因。EcuM_SelectShutdownCause是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_SelectShutdownCause (
EcuM_ShutdownCauseType target
)
7.1.4.5. EcuM_GetShutdownCause
说明: EcuM_GetShutdownCause返回由EcuM_SelectShutdownCause设置的选定关机原因。EcuM_GetShutdownCause是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_GetShutdownCause (
EcuM_ShutdownCauseType* shutdownCause
)
7.1.5. 唤醒处理
7.1.5.1. EcuM_CheckWakeup
说明: 可以调用此函数来检查给定的唤醒源 它将参数传递给集成函数EcuM_CheckWakeupHook。唤醒源的ISR也可以调用它来设置PLL,并检查可能连接到同一中断的其他唤醒源。
void EcuM_CheckWakeup (
EcuM_WakeupSourceType wakeupSource
)
7.1.5.2. EcuM_GetPendingWakeupEvents
说明: 获取挂起的唤醒事件。
EcuM_WakeupSourceType EcuM_GetPendingWakeupEvents (
void
)
7.1.5.3. EcuM_ClearWakeupEvent
说明: 清除唤醒事件。
void EcuM_ClearWakeupEvent (
EcuM_WakeupSourceType sources
)
7.1.5.4. EcuM_GetValidatedWakeupEvents
说明: 获取经过验证的唤醒事件。
EcuM_WakeupSourceType EcuM_GetValidatedWakeupEvents (
void
)
7.1.5.5. EcuM_GetExpiredWakeupEvents
说明: 获取过期的唤醒事件。
EcuM_WakeupSourceType EcuM_GetExpiredWakeupEvents (
void
)
7.1.6. 闹钟
7.1.6.1. EcuM_SetRelWakeupAlarm
说明: EcuM_SetRelWakeupAlarm设置用户的唤醒警报相对于当前时间点。EcuM_SetRelWakeupAlarm是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_SetRelWakeupAlarm (
EcuM_UserType user,
EcuM_TimeType time
)
7.1.6.2. EcuM_SetAbsWakeupAlarm
说明: EcuM_SetAbsWakeupAlarm将用户的唤醒警报设置为绝对时间点。EcuM_SetAbsWakeupAlarm是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_SetAbsWakeupAlarm (
EcuM_UserType user,
EcuM_TimeType time
)
7.1.6.3. EcuM_AbortWakeupAlarm
说明: Ecum_AbortWakeupAlarm中止此用户先前设置的唤醒警报。EcuM_AbortWakeupAlarm 是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_AbortWakeupAlarm (
EcuM_UserType user
)
7.1.6.4. EcuM_GetCurrentTime
说明: EcuM_GetCurrentTime返回EcuM时钟的当前值(即电池连接后的时间)。EcuM_GetCurrentTime是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_GetCurrentTime (
EcuM_TimeType* time
)
7.1.6.5. EcuM_GetWakeupTime
说明: EcuM_GetWakeupTime返回主闹钟的当前值(所有用户闹钟的最小绝对时间)。EcuM_GetWakeupTime是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_GetWakeupTime (
EcuM_TimeType* time
)
7.1.6.6. EcuM_SetClock
说明: EcuM_SetClock将EcuM时钟时间设置为提供的值。该API可用于测试报警服务;可以测试需要几天才能过期的警报。EcuM_SetClock是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_SetClock (
EcuM_UserType user,
EcuM_TimeType time
)
7.1.7. 杂项
7.1.7.1. EcuM_SelectBootTarget
说明: EcuM_SelectBootTarget选择一个引导目标。EcuM_SelectBootTarget是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_SelectBootTarget (
EcuM_BootTargetType target
)
7.1.7.2. EcuM_GetBootTarget
说明: EcuM_GetBootTarget返回当前引导目标 - 请参阅EcuM_SelectBootTarget。EcuM_GetBootTarget是ECU管理器模块端口接口的一部分。
Std_ReturnType EcuM_GetBootTarget (
EcuM_BootTargetType * target
)
7.2. Callback函数
7.2.1. 唤醒源的Callback函数
7.2.1.1. EcuM_SetWakeupEvent
说明: 设置唤醒事件。
void EcuM_SetWakeupEvent (
EcuM_WakeupSourceType sources
)
7.2.1.2. EcuM_ValidateWakeupEvent
说明: 唤醒后ECU状态管理器将在WAKEUP VALIDATION状态/序列期间,停止进程以等待唤醒事件的验证。此API服务用于向ECU管理器模块指示源参数中指示的唤醒事件已被验证。
void EcuM_ValidateWakeupEvent (
EcuM_WakeupSourceType sources
)
7.3. Callout函数
7.3.1. 通用Callout函数
7.3.1.1. EcuM_ErrorHook
说明: 如果发生致命错误,ECU状态管理器将调用此错误Hook。在这种情况下,无法继续处理,必须停止ECU。集成商可以选择停止ECU的方式,即:重置(reset)、停止(halt)、重新启动(restart)、安全状态(safe state)等。
void EcuM_ErrorHook (
uint16 reason
)
7.3.2. STARTUP的Callout函数
7.3.2.1. EcuM_AL_SetProgrammableInterrupts
说明: 如果配置参数EcuMSetProgrammableInterrupts设置为true,则EcuM_AL_SetProgrammableInterrupts执行后,会在ECU上设置中断 可编程中断。
void EcuM_AL_SetProgrammableInterrupts (
void
)
7.3.2.2. EcuM_AL_DriverInitZero
说明: 此Callout应提供驱动程序初始化和其他与硬件相关的启动活动,以加载post-build数据。 注意:这里只能使用预编译(pre-compile)和链接时(link-time)可配置模块。
void EcuM_AL_DriverInitZero (
void
)
7.3.2.3. EcuM_DeterminePbConfiguration
说明: 此Callout应评估某些条件,如端口引脚(port pin)或NVRAM值,以确定应在启动过程的其余部分使用哪个post-build。 它应将此配置数据加载到所有BSW模块均可访问的内存中,并应返回指向EcuM构建后配置的指针,作为所有BSW模块post-build的基础。
const EcuM_ConfigType* EcuM_DeterminePbConfiguration (
void
)
7.3.2.4. EcuM_AL_DriverInitOne
说明: 此Callout应在上电复位的情况下提供驱动程序初始化和其他与硬件相关的启动活动。
void EcuM_AL_DriverInitOne (
void
)
7.3.2.5. EcuM_LoopDetection
说明: 如果配置参数EcuMResetLoopDetection设置为true,则每次启动时都会调用此Callout。
void EcuM_LoopDetection (
void
)
7.3.3. SHUTDOWN阶段的Callout函数
7.3.3.1. EcuM_OnGoOffOne
说明: 该调用允许系统设计者通知将要进入GO OFF I状态。
void EcuM_OnGoOffOne (
void
)
7.3.3.2. EcuM_OnGoOffTwo
说明: 此调用允许系统设计人员通知即将进入GO OFF II状态。
void EcuM_OnGoOffTwo (
void
)
7.3.3.3. EcuM_AL_SwitchOff
说明: 此Callout会执行闭ECU电源的代码。 如果ECU无法自行断电,则复位(reset)可能也是适当的反应。
void EcuM_AL_SwitchOff (
void
)
7.3.3.4. EcuM_AL_Reset
说明: 此Callout会执行重置ECU的代码。
void EcuM_AL_Reset (
EcuM_ResetType reset
)
7.3.4. SLEEP阶段的Callout函数
7.3.4.1. EcuM_EnableWakeupSources
说明: ECU管理器模块调用EcuM_EnableWakeupSource以允许系统设计人员通知在wakeupSource位域中定义的唤醒源将进入SLEEP并相应地调整它们的源。
void EcuM_EnableWakeupSources (
EcuM_WakeupSourceType wakeupSource
)
7.3.4.2. EcuM_GenerateRamHash
说明: 此Callout旨在提供RAM完整性测试,计算RAM的Hash值。
void EcuM_GenerateRamHash (
void
)
7.3.4.3. EcuM_SleepActivity
说明: 在reduced clock sleep模式下Callout会被定期调用。允许在此调用中轮询唤醒源,并调用唤醒通知函数告知ECU状态管理器睡眠状态的结束。
void EcuM_SleepActivity (
void
)
7.3.4.4. EcuM_StartCheckWakeup
说明: 此API由ECU固件调用,以启动相应WakeupSource的CheckWakeupTimer。如果EcuMCheckWakeupTimeout > 0,则启动唤醒源的 CheckWakeupTimer。如果EcuMCheckWakeupTimeout <= 0,则EcuM将忽略API调用。
void EcuM_StartCheckWakeup (
EcuM_WakeupSourceType WakeupSource
)
7.3.4.5. EcuM_CheckWakeupHook
说明: EcuM调用此Callout来轮询唤醒源。
void EcuM_CheckWakeupHook (
EcuM_WakeupSourceType wakeupSource
)
7.3.4.6. EcuM_CheckRamHash
说明: 此Callout旨在提供RAM完整性测试。此测试的目标是确保在长时间的SLEEP持续时间后,RAM内容仍然一致。检查不需要详尽,因为这会在唤醒期间消耗相当多的处理时间。设计良好的检查将快速执行并以足够的概率检测RAM完整性缺陷。本规范不对为特定ECU选择的算法做任何假设。必须仔细选择要检查的RAM区域。这取决于检查算法本身和任务结构。执行RAM检查的任务的堆栈内容,例如很可能无法检查。将哈希生成和检查在同一个任务中是一个很好的做法,并且该任务不是可抢占的,并且哈希生成和哈希检查之间只有很少的活动。RAM检查本身由系统设计人员提供。在应用多核且存在 Satellite-EcuM(s) 的情况下:此API将仅由Master-EcuM调用。
uint8 EcuM_CheckRamHash (
void
)
7.3.4.7. EcuM_DisableWakeupSources
说明: ECU管理器模块通过调用EcuM_DisableWakeupSources来设置在wakeupSource位域中定义的唤醒源,实现禁止相应的唤醒源唤醒ECU。
void EcuM_DisableWakeupSources (
EcuM_WakeupSourceType wakeupSource
)
7.3.4.8. EcuM_AL_DriverRestart
说明: 此Callout应在唤醒情况下,提供驱动程序初始化和其他与硬件相关的启动活动。
void EcuM_AL_DriverRestart (
void
)
7.3.5. UP阶段的Callout函数
7.3.5.1. EcuM_StartWakeupSources
说明: 此Callout将启动给定的唤醒源,以便它们准备好执行唤醒验证。
void EcuM_StartWakeupSources (
EcuM_WakeupSourceType wakeupSource
)
7.3.5.2. EcuM_CheckValidation
说明: EcuM调用此Callout以验证唤醒源。如果检测到有效唤醒,则应通过EcuM_ValidateWakeupEvent向EcuM报告。
void EcuM_CheckValidation (
EcuM_WakeupSourceType wakeupSource
)
7.3.5.3. EcuM_StopWakeupSources
说明: 在唤醒验证不成功后,此Callout需停止给定的唤醒源。
void EcuM_StopWakeupSources (
EcuM_WakeupSourceType wakeupSource
)
7.4. 调度表函数
7.4.1. EcuM_MainFunction
说明: 此服务的目的是在操作系统启动并运行时执行ECU状态管理器的所有活动。
void EcuM_MainFunction (
void
)
微信扫一扫,获取更多及时资讯
